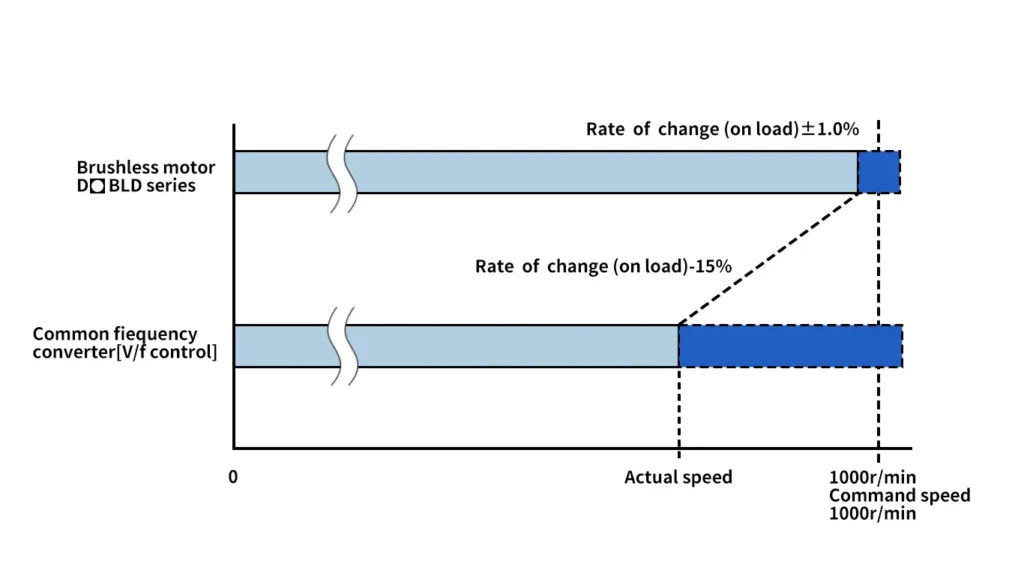
Stabile Geschwindigkeitsregelung
Der bürstenlose Motor gibt weiterhin die Drehzahl vor, und ein Rückmeldesignal wird mit der Drehzahl des Motors verglichen, um die an den Motor angelegte Spannung anzupassen. Selbst wenn sich die Last ändert, kann die Drehzahl daher weiterhin von einer langsamen Momentaneinstellung bis hin zu einer Stabilisierung der Laufgeschwindigkeit eingestellt werden. Ein dreiphasiger Induktionsmotor mit Umrichtersteuerung ist keine Rückkopplungssteuerung, sodass die Drehzahl bei einer höheren Last stark reduziert wird. Für hohe Anforderungen an die Drehzahlstabilität wird die Verwendung eines bürstenlosen Motors empfohlen.