Si vous travaillez dans un secteur qui dépend de la précision, de la stabilité et de la cohérence des performances et des résultats, vous avez besoin d'un système fiable et stable à l'arrière. Ce système doit fonctionner selon un mécanisme répétitif clair, cohérent et contrôlé.
Lorsque les ingénieurs cherchent à trouver les bonnes solutions de servocommande pour leurs projets, ils sont confrontés aux problèmes suivants la confusion et les informations incomplètes qui les laisse perplexes. Lorsqu'ils essaient de comprendre comment un servomoteur atteint la perfection et la précision, les réponses qu'ils obtiennent se présentent souvent sous la forme de formules, de signaux et de théories complexes.
Pour les personnes non techniques des services d'approvisionnement, ainsi que pour les ingénieurs débutants, cette les informations lourdes n'apportent souvent aucun bénéfice. Il crée plutôt une barrière d'apprentissage qu'il est très difficile de franchir.
En réalité, le fonctionnement d'un servomoteur n'est pas du tout compliqué. C'est juste qu'il y a rarement des explications appropriées pour aider le commun des mortels à comprendre comment il fonctionne. En d'autres termes, vous pouvez facilement comprendre le fonctionnement d'un servomoteur en comprenant ce qui suit le mécanisme de mouvement du monde réel.
C'est exactement ce que nous allons faire dans ce guide. Avant de nous plonger dans les étapes du fonctionnement d'un servomoteur, nous allons relier l'ensemble du concept à un mouvement instinctif dans le monde réel, afin que vous puissiez mieux comprendre.
L'analogie humaine : comment nos mains reflètent-elles la servocommande ?

Pour comprendre le fonctionnement de base d'un servomoteur, vous pouvez simplement Regardez comment vous prenez les choses dans la vie réelle. Par exemple, vous pouvez vous imaginer en train de tendre la main pour prendre un verre ou une tasse d'eau.
Si vous décomposez l'ensemble du processus en micro-étapes, vous commencerez par votre cerveau décider de prendre quelque chose. Une fois la décision prise, le cerveau envoie des signaux à votre main pour effectuer le geste de ramasser le verre. En ce moment, vos yeux restera constamment concentré sur le mouvement de votre main.
Si votre main se dirige dans une autre direction et que le verre est loin de vous, votre cerveau vous corrigera instantanément et vous aidera à ramasser rapidement le verre. Il s'agit d'un boucle de commandement, d'action, d'observation et de correction. Cette boucle est une boucle répétitive qui nous aide, nous les humains, à accomplir nos tâches quotidiennes sans problème.
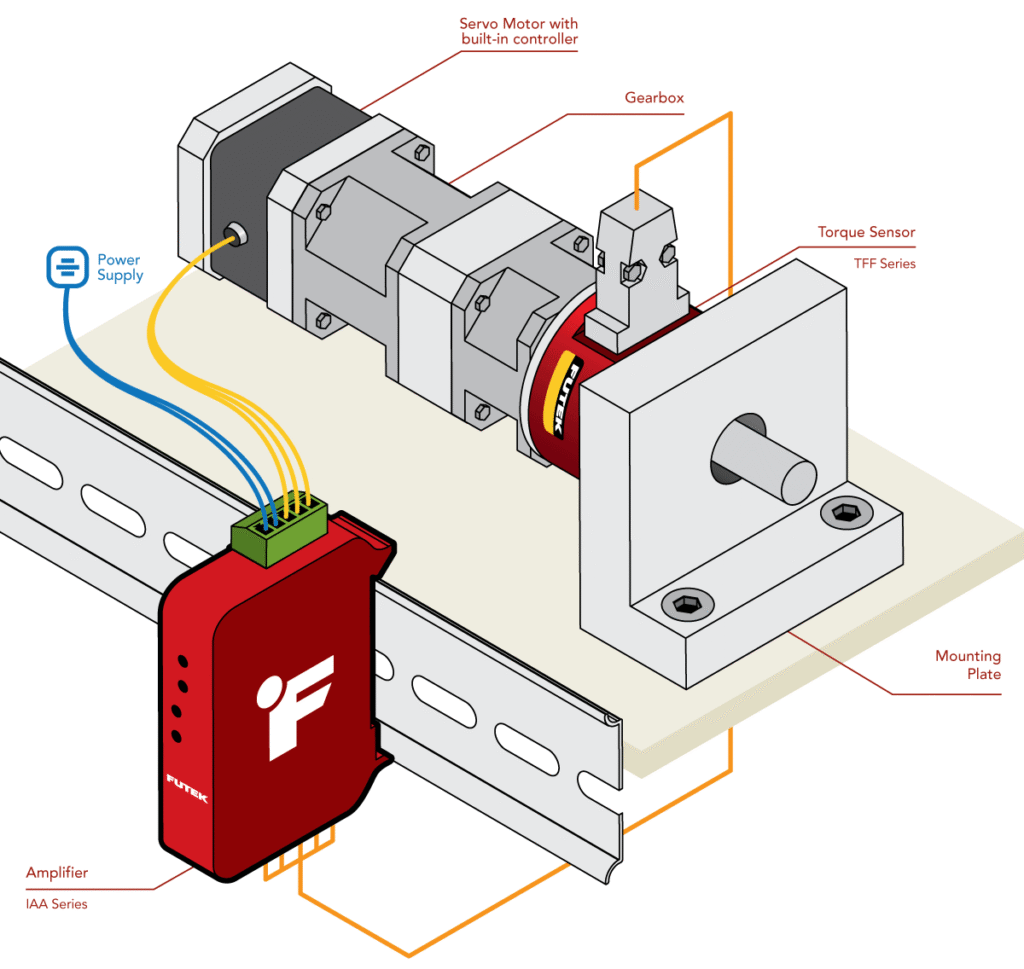
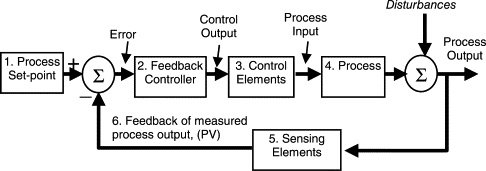
C'est exactement comme cela qu'un système d'asservissement fonctionne. Il s'agit d'un système coordonné qui fonctionne sur la base d'une boucle de commandement, d'action, d'observation et de correction, en utilisant les éléments suivants :
- Le contrôleur, qui joue le rôle de cerveau du système d'asservissement.
- Le servomoteur lui-même, qui agit comme le bras et exécute le mouvement.
- Le codeur, qui agit comme les yeux du système, surveillera le flux de travail et fera un rapport si une correction est nécessaire.
Maintenant que vous avez compris la relation de base, il convient d'approfondir la compréhension de la relation entre les deux. moteur servoélectrique Le travail peut être très facile.
Les trois composants essentiels d'un système d'asservissement
Avant d'aborder les principaux composants et les détails techniques, nous tenons à vous rappeler une chose : Dans le fonctionnement d'un servomoteur, tout est relié avec précision à une autre chose. Si vous comprenez tout en gardant cette idée à l'esprit, tout se passera bien.
- Contrôleur : Le “cerveau” qui planifie chaque mouvement
Le contrôleur d'un servomoteur décide de ce qui doit se passer. Par exemple, il décide de la distance à laquelle le moteur doit se déplacer, de la rapidité et de la fluidité du mouvement, et de l'endroit où le positionnement final doit s'arrêter.
Le contrôleur prépare et exécute l'ensemble du plan de mouvement d'un moteur une fois qu'il est mis en marche. Il renvoie la commande au moteur et reçoit également un retour d'information de l'encodeur afin de déterminer si une correction est nécessaire. Il s'agit d'un élément important du servomoteur, sans lequel aucun mouvement ne peut avoir lieu.
Plus la contrôleur est, mieux il planifie et inspecte, ce qui améliore le fonctionnement général du moteur.
- Servomoteur : Le “bras” qui exécute l'action
Le rôle du moteur est de convertir l'entrée électrique en sortie mécanique. Il tournera, se maintiendra, accélérera ou décélérera exactement selon les instructions et la demande du contrôleur.
Si le moteur est stable, les mouvements seront plus fluides, la puissance et le couple seront constants et les vibrations seront réduites. Ce moteur est principalement ce qui décide de la précision en robotique, AGV, et d'autres systèmes d'automatisation.
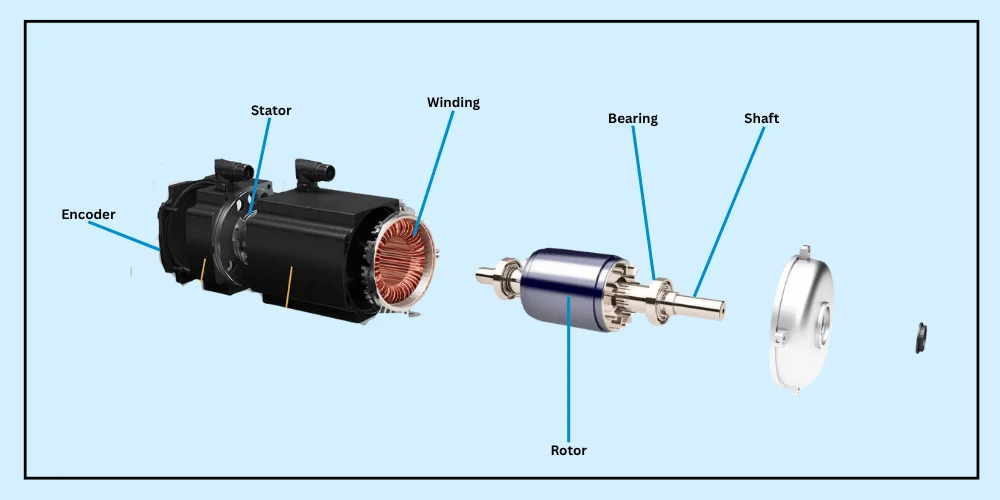
- Encodeur : Les “yeux” qui voient et rapportent
Le codeur est un un suivi cohérent du système. Il garde tout sous contrôle en mesurant la position, l'angle, la vitesse et le mouvement à chaque instant, et renvoie rapidement ces informations au contrôleur.
Si le moteur est soumis à une charge supplémentaire, s'il dérive, dépasse ou est en retard, le codeur le signale immédiatement au cerveau du système. De cette manière, il garantit une correction douce et instantanée. Plus le codeur est performant et de qualité, plus sa précision est élevée.
Comment fonctionnent les servomoteurs : Un flux de travail étape par étape
Comprendre le fonctionnement technique d'un système d'asservissement devient facile lorsque vous la décomposez en étapes claires et interdépendantes. Vous pouvez considérer l'ensemble du travail comme une danse chorégraphiée, où chaque mouvement suit en douceur le mouvement précédent, guidé par des corrections et des retours d'information, tout en assurant une coordination parfaite.
Vous trouverez ci-dessous la décomposition par étapes du flux de travail d'un système d'asservissement.
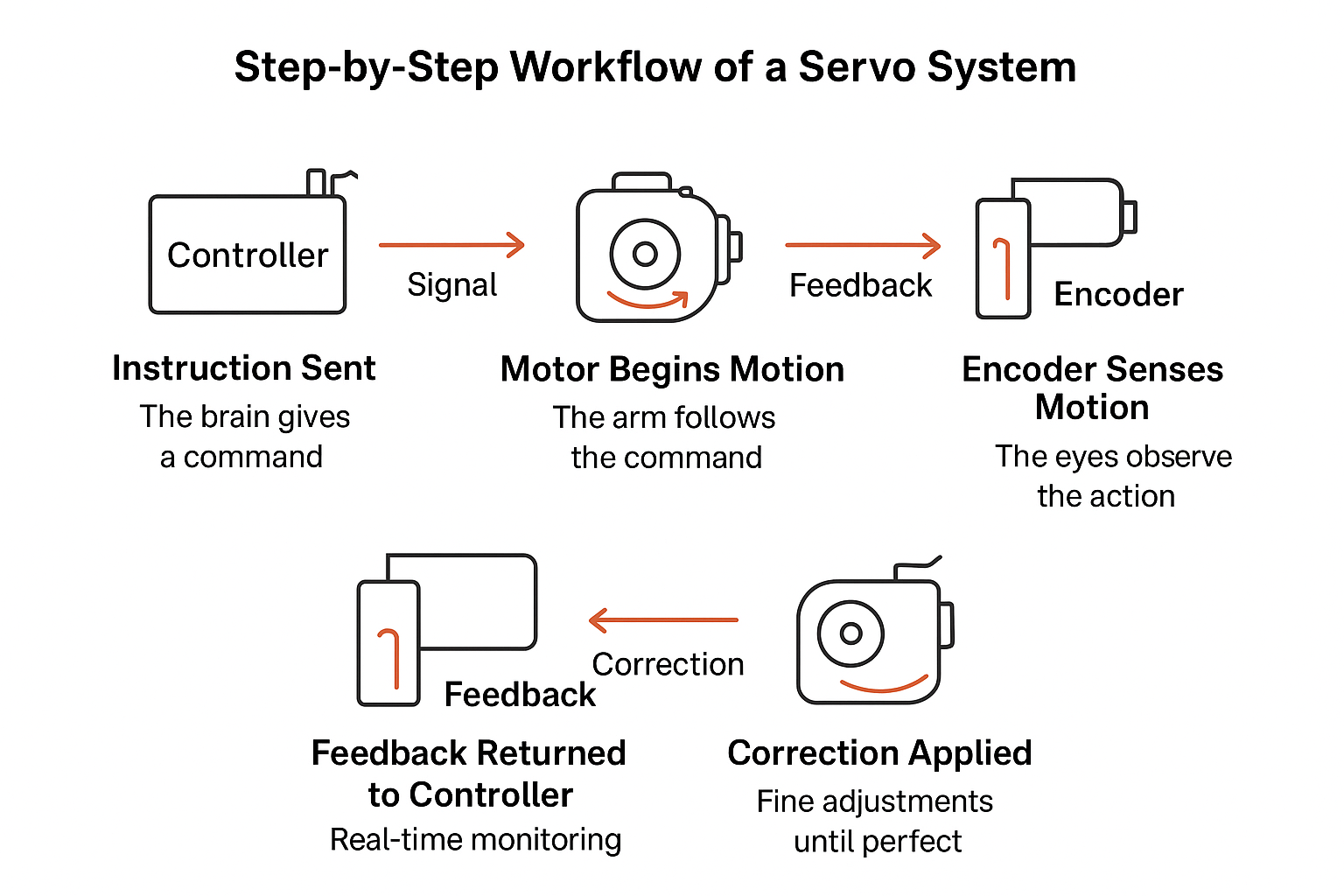
Étape 1 - Instruction envoyée (le cerveau émet une commande)
Comme pour tout mouvement du corps humain, le processus de fonctionnement d'un moteur commence également par le contrôleur, qui agit comme le cerveau du système. Pensez à la manière dont le cerveau humain décide de prendre un verre d'eau. De la même manière, le contrôleur d'un moteur décider de ce qu'il doit faire.
En d'autres termes, le contrôleur décidera de la l'angle de rotation, le positionnement, le suivi, ainsi que la vitesse. Une fois la décision prise, le contrôleur envoie l'instruction sous forme de signal électrique au moteur.
Étant donné qu'il s'agit de la première étape qui amorce le fonctionnement d'un système, la clarté et l'efficacité du système doivent être assurées. La précision à ce stade est intransigeante. Si le contrôleur envoie des signaux faibles ou incorrects au moteur, le mouvement sera interrompu dès le début, ce qui perturbera le fonctionnement de l'ensemble du système.
Selon son type, le contrôleur peut utiliser modulation de largeur d'impulsion, modulation analogique ou communication numérique pour envoyer une commande correcte et précise au moteur.
Étape 2 - Le moteur commence à bouger (le bras suit la commande)
Une fois que l'instruction a été correctement reçue, le moteur commencent à se mettre en place. À ce stade, l'action du moteur dépend directement de la commande qui lui est donnée sous la forme d'un signal électrique. En fonction du signal qu'il reçoit, le moteur se déplacera linéairement, tournera ou maintiendra une position spécifique de manière cohérente.
Si l'on se réfère à l'analogie de la vie réelle, on peut comprendre cette étape comme le bras qui se déplace vers l'avant pour saisir le verre d'eau. À ce stade, le la qualité du moteur et de ses composants internes a une grande importance. Si le moteur est stable et fabriqué avec des composants de haute qualité, il réagira en douceur au signal sans provoquer de vibrations ou de dépassement.
Pour les applications industrielles et la robotique, la fluidité des mouvements garantit un positionnement et une décision exacts. l'endroit où les pièces doivent être placées et le fonctionnement de la machine.
Étape 3 - Le codeur détecte le mouvement (les yeux observent l'action)
Lorsque le moteur est en mouvement, l'encodeur suivre en permanence l'évolution de la situation pour sa position, sa précision, sa vitesse et ses angles de rotation. C'est comme si vos yeux observaient vos bras lorsqu'ils atteignent le verre. Le codeur envoie ensuite un retour d'information au contrôleur sur la base de l'observation qu'il a faite.
Étape 4 - Retour d'information au contrôleur
Une fois que le contrôleur reçoit le retour d'information, il compare le travail réel avec le travail souhaité du moteur. En cas de différence, il calcule immédiatement les ajustements nécessaires.
Étape 5 - Application de la correction
Enfin, le contrôleur envoyer les bons messages au moteur, en ajustant la vitesse, le couple, l'angle de rotation et tout le reste jusqu'à ce que l'objectif de travail et de positionnement soit atteint. Cela se produit souvent au cours du fonctionnement d'un moteur, même lorsque le mouvement apparent semble fluide.
Dans la réalité, ce serait comme votre main se poussant elle-même et en modifiant ses mouvements pour aller directement vers le verre au lieu d'aller ailleurs.
Pourquoi ce principe de boucle fermée est-il important dans les applications réelles ?
Précision et répétabilité sont deux des meilleures caractéristiques de tout système d'asservissement en boucle fermée. Les systèmes en boucle fermée permettent de vérifier et de corriger en permanence de petits événements avant même que le problème ne s'aggrave. C'est ce retour d'information en boucle fermée qui permet à un servo d'assurer un mouvement cohérent sans dérive, même dans des conditions externes changeantes.
Dans un système en boucle fermée, la la performance reste protégée malgré le déplacement des charges externes. En revanche, dans une configuration en boucle ouverte, l'ajout de poids ou de résistance externe passe inaperçu. Elle se développe lentement et affecte progressivement le fonctionnement de l'ensemble du système. En revanche, dans une boucle fermée, le retour d'information est instantanément transmis au cerveau, qui procède à des ajustements rapides, empêchant ainsi les machines de s'affaisser sous des charges plus lourdes ou de se désynchroniser.
Un autre avantage notable d'un système en boucle fermée est le suivant sa réactivité. Dans un tel système, les corrections se font en temps réel, et l'installation ne doit pas attendre qu'un problème soit résolu avant de continuer. En d'autres termes, les corrections sont effectuées en même temps que le fonctionnement du moteur.
Il ne s'agit pas seulement réduit les temps d'arrêt et les dépassements mais aussi de tout aplanir et de réduire le temps nécessaire au système pour revenir à sa position d'origine. Cette caractéristique est extrêmement importante pour les lignes d'emballage à évolution rapide, les stations d'assemblage et d'autres outils qui dépendent d'une action rapide et stable.
Dans un système en boucle fermée, tuning and maintenance devient plus pratique qu'un système en boucle ouverte. Étant donné que le système se mesure et se surveille déjà lui-même et ses aspects, les ingénieurs trouvent qu'il est extrêmement facile d'affiner rapidement les paramètres en toute confiance et avec moins de risques d'erreur.
Voici une comparaison rapide entre un système en boucle fermée et un système en boucle ouverte pour une meilleure compréhension :
| Fonctionnalité | Système en boucle ouverte | Système en boucle fermée |
| Retour d'information | Aucun | Retour d'information en temps réel via l'encodeur |
| Précision | Plus bas, sujet à la dérive | Élevée, correction automatique des erreurs |
| Réactivité | Fixe, non ajustable | Adaptation instantanée aux changements |
| Stabilité sous charge | Peut se déplacer ou dépasser | Maintien de la position même en cas de changement de charge |
| Complexité | Simple, moins cher | Plus complexe, nécessite un codeur et un contrôleur |
| Applications | Moteurs simples, automatisation de base | Robotique, CNC, automatisation de précision |
Qu'est-ce qui affecte réellement les performances des servomoteurs ?
Plusieurs facteurs interconnectés définissent la qualité et la précision des performances d'un système d'asservissement. Les principaux sont les suivants :
1- Stabilité du moteur : La fluidité des rotations et la régularité du couple produit, ainsi que la réduction des vibrations, influencent directement la qualité du mouvement du moteur. Un système stable répond proprement et sans heurt aux commandes qu'il reçoit. Plus un système est stable, mieux il répondra aux commandes et aux changements de charge.
2- Précision du codeur: Une meilleure résolution du codeur se traduit directement par un retour d'information détaillé et clair. Un codeur capable de détecter les changements les plus infimes est une bénédiction. Il peut coder directement et envoyer des informations parfaites au contrôleur, ce qui permet d'améliorer et d'accélérer les performances du moteur.
3- Qualité de l'algorithme du conducteur : L'amélioration de l'algorithme d'un pilote permet de mieux interpréter le retour d'information et d'ajuster le courant, la vitesse et le couple. Un algorithme affiné se traduit par une meilleure réactivité globale, une réduction des dépassements et de meilleures performances du moteur, même en cas de variations rapides de la charge.
4- Variation de la charge : Les changements et les différences, tels que les variations soudaines de la charge, montrent à quel point le système d'un moteur est efficace et bien soudé. Un moteur doté d'une meilleure capacité de correction et de retour d'information sera plus performant, même dans des conditions de changement constant.
5- Construction et assemblage mécaniques : Des composants de moteur mal alignés, en porte-à-faux ou mal accouplés réduiront la précision de l'ensemble du système. Même les meilleurs moteurs ne sont pas performants si leur configuration mécanique et leur construction ne sont pas à la hauteur.
6- Facteurs environnementaux : Des facteurs tels que la température extérieure, la poussière, les vibrations et l'humidité affecteront certainement le fonctionnement global du système. Il est conseillé de n'acheter un moteur qu'après en avoir vérifié les caractéristiques. indice IP et de s'assurer qu'il est adapté à l'environnement dans lequel il sera utilisé.
Comment DMKE assure-t-il la fiabilité et la précision des performances des servomoteurs ?
Une fois que l'on a compris les facteurs qui influencent les performances d'un servomoteur, on comprend mieux pourquoi les composants de qualité à l'intérieur d'un moteur et des tests rigoureux avant son utilisation et sa vente sont si importants.
À DMKE, nos ingénieurs et techniciens se concentrer sur les moindres détails pendant le développement du moteur afin de vous fournir des produits fiables et précis, avec une sortie exacte. Tous nos produits servo sont conçus pour garantir une sortie de couple régulière et stable, résister aux vibrations et conserver leur précision même sous des charges élevées.
Une fois associés à des encodeurs de haute qualité, ces moteurs vous fournir un retour d'information approprié. Ces moteurs assureront un système de rétroaction en boucle fermée approprié qui permettra au contrôleur de surveiller et d'améliorer les performances globales du système.
À DMKE, Les pilotes que nous utilisons dans notre moteur sont optimisée à l'aide d'algorithmes avancés. Nos conducteurs ont la capacité de traduire correctement le retour d'information et de prendre des mesures d'ajustement immédiates, tout en réduisant le bruit et les vibrations pendant le fonctionnement.
Nous n'utilisons pas seulement des composants de qualité à l'intérieur du système, mais nous veillons également à ce que chaque composant soit soumis à un contrôle de qualité. des tests internes stricts, Nous avons mis au point un système de contrôle de la qualité qui comprend une procédure en 8 étapes pour vérifier les relations entre les temps de charge, les cycles de longue durée et la précision. Cela garantit des performances constantes pour tous nos produits et fait de nous un fournisseur capable de répondre à des commandes en masse.
Conçus pour un usage industriel, les servomoteurs DMKE offrent une large gamme d'utilisations pratiques dans les domaines suivants les industries de la robotique, de l'EGV et de la CNC, y compris d'autres lignes d'automatisation. Tous nos produits sont capables de gérer plus agréablement et plus intelligemment les charges variables et les conditions externes changeantes sans nuire aux performances.
Des pièces de haute qualité, un calibrage minutieux et des tests rigoureux sont à l'origine de l'utilisation de l'appareil. Produits DMKE se distinguent des autres moteurs. C'est exactement la raison pour laquelle tous nos moteurs offrent une précision, une stabilité et une fiabilité inégalées.
Commencez à faire des choix plus judicieux en matière de motorisation avec DMKE !
Maintenant que vous avez bien compris le fonctionnement d'un servomoteur et que vous avez saisi l'importance d'un contrôle en boucle fermée, il est facile de voir comment des composants de qualité et un système de retour d'information précis dans tout moteur sont importants.
Pour les ingénieurs, les parties prenantes, les propriétaires de l'industrie et les acheteurs qui recherchent des solutions de motorisation fiables, précises et de qualité, DMKE propose plusieurs produits d'asservissement qui peuvent fournir des performances éprouvées.
Toutes nos solutions de motorisation, y compris les servos personnalisés, ne sont mis à la disposition des clients qu'après avoir passé des tests internes stricts. Test en 8 étapes et contrôle de qualité rigoureux principes. Que vous ayez besoin d'un moteur pour la robotique, les AGV, les CNC ou toute autre installation industrielle automatisée, DMKE peut vous aider à choisir le bon servomoteur sans perdre votre temps.
Visitez notre site web pour découvrir la gamme de produits servo DMKE et la gamme de produits servo DMKE. nous contacter aujourd'hui pour obtenir le les meilleures solutions de servomoteurs pour vos besoins.