Un moteur CC sans balais ne peut pas tourner tout seul. Cette magie s'opère grâce à un pilote de moteur. Il contrôle la synchronisation et le flux d'électricité vers le moteur. Le circuit d'attaque est la pluie du moteur qui décide du moment et de la quantité de puissance à fournir.
Malgré son importance considérable, de nombreuses équipes considèrent le pilote du moteur comme un élément secondaire. Elles choisissent généralement le moteur en premier et se préoccupent du pilote plus tard, ou ne se soucient pas du tout du pilote. Cependant, les expériences réelles montrent que cette approche est rarement efficace.
Un bon pilote doit correspondre aux caractéristiques de VOTRE moteur et à la demande de VOTRE application, car chaque besoin est différent.
C'est pourquoi nous avons élaboré ce guide qui comprend cinq conseils pratiques pouvant vous aider à choisir le bon variateur de vitesse pour votre moteur BLDC. Ces conseils sont détaillés, prenez donc le temps de les lire et de prendre une décision éclairée.
Avant de choisir un conducteur, comprenez le rôle qu'il joue dans votre système
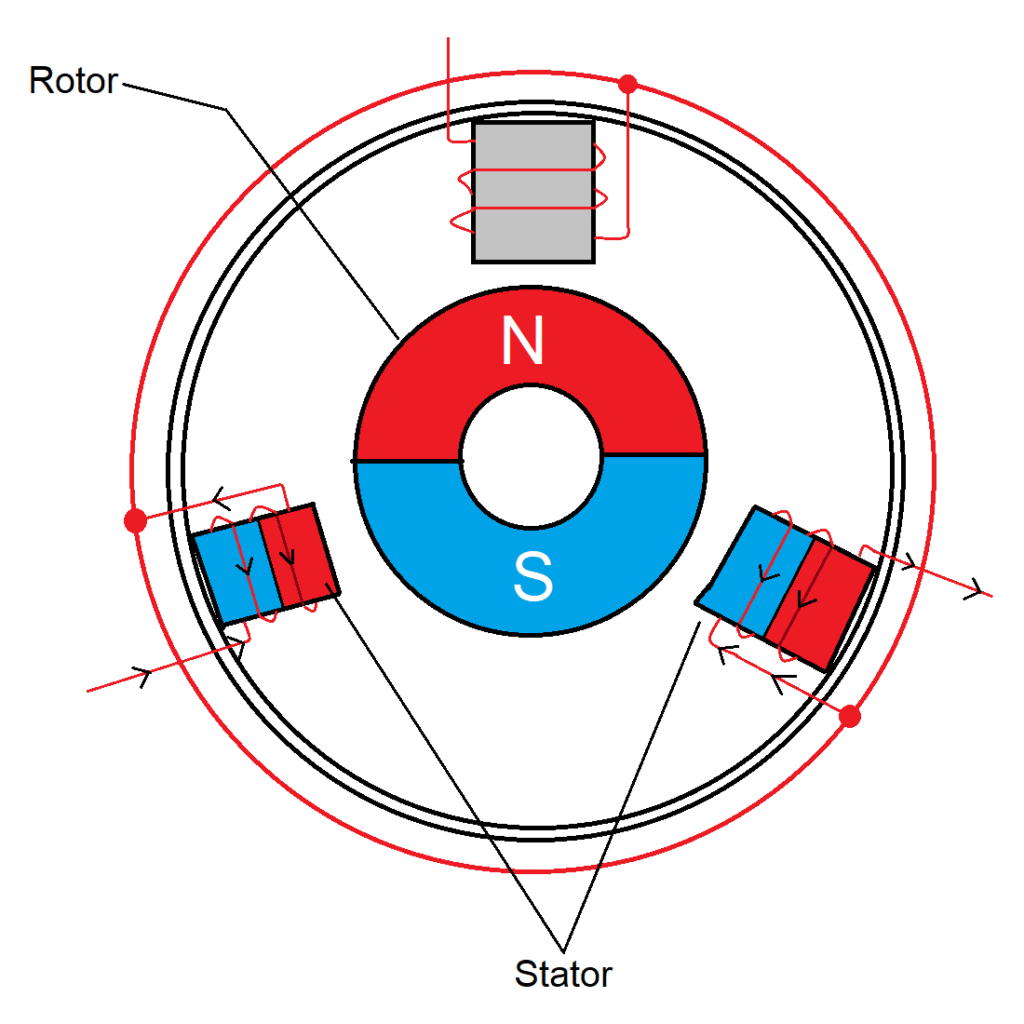
Visualiser un moteur à courant continu sans balais (BLDC) et le pilote comme un système. Tout comme votre cerveau maintient l'ordre dans le corps, un pilote de moteur contrôle un moteur BLDC. Dans un corps humain, le cerveau se développe en fonction des besoins du corps. Par conséquent, un pilote de moteur doit être correctement adapté à votre moteur.
S'il n'est pas correctement adapté, même un moteur de haute qualité sera confronté à une vitesse instable et à une chaleur excessive. Il est évident que ces causes se traduiront par des performances improductives.
Et ce n'est pas tout ! Le rôle du conducteur va bien au-delà de la simple alimentation du moteur. Il détermine l'efficacité avec laquelle le moteur peut convertir l'énergie en mouvement. Il influe également sur le bruit et les vibrations, qui peuvent être gênants.
Vous pensez peut-être qu'un simple pilote de moteur peut suffire pour votre moteur. Cependant, ce n'est pas le cas, car différentes applications imposent des exigences différentes au couple moteur et pilote. Par exemple, un bras robotisé nécessite des mouvements précis, tandis qu'une petite pompe privilégie des performances constantes et qu'un appareil de mobilité personnelle doit être capable de gérer des changements soudains de charge.
C'est pourquoi il est important de considérer le moteur et le conducteur comme un système unique.
Maintenant que vous avez compris le rôle du pilote, voyons comment choisir le bon pour votre moteur BLDC. Nous vous proposons cinq conseils pour vous aider à prendre une décision judicieuse.
Conseil #1 : Vérifiez si la gamme de puissance du conducteur correspond aux besoins réels de votre moteur
Chaque moteur BLDC a une tension nominale qui indique le niveau auquel il fonctionne le plus efficacement. Par conséquent, si vous choisissez un pilote dont la tension est supérieure à la valeur nominale du moteur, vous risquez de provoquer une chaleur excessive et un bruit inutile. Ces deux phénomènes peuvent entraîner une usure accélérée des composants. D'autre part, un circuit d'attaque à faible tension peut empêcher le moteur d'atteindre la vitesse prévue ou de fonctionner correctement. couple. Cela se traduit par des performances médiocres.
Il est donc important de choisir un pilote qui fournit une tension stable qui reste dans la plage recommandée pour le moteur tout en s'adaptant aux petites variations causées par l'alimentation ou les changements de charge temporaires.
Capacité actuelle et charges de pointe
Les moteurs BLDC fonctionnent rarement à un courant constant. Le démarrage, l'accélération ou l'augmentation soudaine de la charge peuvent provoquer des pics de courant importants, bien supérieurs au niveau de fonctionnement continu du moteur. Un circuit d'attaque choisi uniquement pour le courant nominal ne peut pas gérer ces pics, ce qui peut entraîner une surchauffe, des arrêts de protection, voire des dommages au moteur et au circuit d'attaque. Pour éviter ces problèmes, les ingénieurs doivent prendre en compte la capacité de courant de crête du circuit d'attaque, et pas seulement les valeurs nominales de courant continu.
Ce concept, souvent appelé “marge de manœuvre”, fournit un tampon pour gérer les charges transitoires en toute sécurité. Une ligne directrice pratique consiste à choisir un circuit d'attaque capable de supporter un courant supérieur de 25 à 40% à la valeur de fonctionnement typique du moteur. Par exemple, si un moteur consomme 3 ampères en continu mais peut atteindre 6 ampères en charge, le circuit d'attaque doit être dimensionné au moins pour le pic et, idéalement, disposer d'une marge supplémentaire.
Gestion thermique et efficacité
Même lorsque les spécifications de tension et de courant correspondent, une mauvaise conception thermique ou un faible rendement peuvent limiter les performances. Les pilotes de moteur qui génèrent une chaleur excessive peuvent réduire le couple fourni et raccourcir la durée de vie du moteur et du pilote.
C'est pourquoi il est essentiel d'évaluer les caractéristiques thermiques du circuit d'attaque du moteur. Si un circuit d'attaque est bien conçu en termes de dissipation thermique, il peut fonctionner de manière fiable dans des conditions de charge soutenue et de pointe.
Cela signifie que vous devez vérifier les fiches techniques pour connaître les caractéristiques thermiques.
Considérations pratiques pour des applications dans le monde réel
Choisir un pilote de moteur uniquement en fonction de la tension et de l'intensité nominales est une erreur courante. D'autres facteurs qui ont été explorés dans les sections précédentes de ce conseil doivent également être pris en compte. N'oubliez pas non plus que chaque scénario nécessitera des considérations différentes dans le choix du pilote, il est donc très important d'analyser d'abord vos besoins.
Conseil #2 : Déterminez le type de commande de moteur dont vous avez réellement besoin

Le choix du bon pilote de moteur va bien au-delà de l'adéquation entre le courant et la tension. Il est tout aussi important de comprendre le type de commande de moteur dont votre application a besoin.
Les trois styles de contrôle les plus courants
Les conducteurs d'automobiles se répartissent généralement en trois catégories :
- sans capteur,
- à base de capteurs à effet Hall
- pilotes supportés par l'encodeur
Chaque méthode diffère par la façon dont elle détecte la position du rotor et applique la puissance aux enroulements du moteur.
Commençons par le conducteurs sans capteurs qui évaluent la position du rotor sur la base de la force contre-électromotrice générée par le moteur lorsqu'il tourne. Ils sont mécaniquement plus simples car aucun capteur physique n'est nécessaire + ils ont tendance à être plus silencieux à des vitesses plus élevées.
Les pilotes sans capteur fonctionnent correctement lorsque la priorité est d'assurer un mouvement fluide à des vitesses modérées à élevées et que le couple de démarrage requis est minime. Cependant, ils peuvent rencontrer des difficultés pour le contrôle à très basse vitesse et le positionnement de haute précision, car le signal de force contre-électromotrice devient faible ou incohérent à proximité de la vitesse zéro.
Ensuite, il y a les pilotes de capteurs à effet Hall qui utilisent de petits capteurs magnétiques intégrés au moteur pour détecter la position du rotor. Ce retour d'information direct permet un démarrage fiable et un fonctionnement à faible vitesse.
Les capteurs à effet Hall rendent le moteur prévisible + plus facile à contrôler. C'est pourquoi ils sont couramment utilisés dans la robotique, les pompes et les petits véhicules électriques. Bien qu'ils soient légèrement plus complexes que les moteurs sans capteur, ils offrent un meilleur contrôle sur une plus grande plage de vitesse, en particulier à faible vitesse ou lors de cycles fréquents de démarrage et d'arrêt.
Enfin, le pilotes supportés par l'encodeur offrent le plus haut niveau de contrôle. Il le fait en fournissant un retour d'information continu. Ces pilotes conviennent aux applications qui exigent un contrôle précis des mouvements, comme les bras robotisés, les machines à commande numérique ou les équipements d'assemblage automatisés.
Choisir en fonction de votre application
Le type de contrôle approprié dépend toujours de l'utilisation qui sera faite du moteur. S'il s'agit d'un simple ventilateur ou d'une pompe, une commande sans capteur est souvent suffisante (et même rentable). En revanche, il est préférable d'éviter les commandes sans capteur si le système doit changer fréquemment de direction. Les moteurs à capteurs à effet Hall, en revanche, constituent une solution intermédiaire polyvalente.
Conseil #3 : Recherchez une protection intégrée et une gestion de la chaleur

Même un pilote parfaitement adapté peut tomber en panne ou causer des problèmes s'il ne dispose pas des fonctions de protection et de gestion de la chaleur appropriées. Nous avons déjà abordé la question de la chaleur et de la température, mais dans cette section, nous allons aller plus loin.
Risques courants pour les systèmes BLDC
Les moteurs à courant continu sans balais sont souvent confrontés à plusieurs risques opérationnels qui peuvent compromettre leurs performances.
L'un des problèmes les plus fréquents est le décrochage inattendu. Il se produit lorsque le moteur est bloqué ou surchargé. Dans une telle situation, le courant monte rapidement en flèche et génère de la chaleur. Cela risque de déclencher le pilote ou d'endommager le moteur.
Un autre risque est celui des surtensions soudaines. Celles-ci sont généralement causées par des fluctuations de la tension d'alimentation ou par des changements brusques de charge. Ces surtensions sollicitent l'électronique et affectent la stabilité du moteur.
La surchauffe est un autre problème critique, en particulier dans les espaces clos où la ventilation est limitée, comme dans les robots compacts ou les appareils alimentés par batterie.
Des pilotes qui protègent votre matériel
Les pilotes de moteur modernes comportent des protections intégrées pour atténuer ces risques.
Des fonctions telles que la protection contre les surintensités et les surtensions permettent de contrôler automatiquement la charge électrique du moteur. Elles évitent également les dommages causés par les pointes de tension.
Il y a ensuite la détection de décrochage du moteur, qui peut mettre en pause ou limiter le courant en cas de décrochage. La surveillance de la température est une autre protection essentielle. Elle est souvent mise en œuvre sous la forme d'un ralentissement ou d'un arrêt automatique si le conducteur atteint des niveaux dangereux.
Pourquoi la conception thermique est importante, même pour les petits moteurs
Même les moteurs compacts sont sensibles aux problèmes liés à la chaleur.
Une température excessive n'affecte pas seulement le pilote, mais aussi les autres composants d'un moteur sans balais, tels que les enroulements, les roulements et l'électronique. Une mauvaise gestion de la chaleur entraînera une chute du couple et, par conséquent, une réduction de l'efficacité.
Si un circuit d'attaque a une conception thermique appropriée, le fonctionnement sera cohérent et il y aura moins d'étranglement thermique. Cela est particulièrement important dans les applications où le système est fermé ou la ventilation limitée, comme les petits appareils industriels, les robots compacts ou les machines robotisées.
Conseil #4 : Réfléchissez à la façon dont vous voulez contrôler le moteur
Étant donné qu'un pilote de moteur est une question de commande, il est important de prendre en compte le facteur de contrôle lors du choix du pilote de moteur.
Le “comment” du commandement d'un moteur
Les pilotes de moteur offrent plusieurs façons de contrôler un moteur BLDC. La méthode la plus simple est la commande de vitesse analogique ou à modulation de largeur d'impulsion (PWM). Cette approche permet d'ajuster la vitesse du moteur à l'aide d'une tension d'entrée ou d'un signal modulé en largeur (PWM).
Elle est simple, rentable et fonctionne bien pour les applications où le moteur n'a besoin que d'un fonctionnement à vitesse variable de base. Il s'agit par exemple de petits ventilateurs, de pompes ou de convoyeurs à bande où la précision du positionnement n'est pas essentielle et où les changements de vitesse sont progressifs.
Une deuxième méthode est le contrôle basé sur la communication. Les interfaces de cette méthode permettent de surveiller et de contrôler plusieurs moteurs à partir d'un contrôleur central.
Les pilotes basés sur la communication permettent de gérer des tâches plus complexes. Ce type de commande est idéal pour toute application dans laquelle le moteur doit répondre de manière intelligente aux signaux des capteurs ou aux commandes à distance.
Adapter l'interface à la taille et à la complexité de votre système
Le type d'interface de commande de moteur que vous choisirez doit être compatible avec la taille et la complexité de votre système.
Si votre projet ne nécessite que des ajustements de base de la vitesse, une simple interface analogique ou PWM est souvent suffisante. Elle réduit le câblage et le coût + elle est plus facile à mettre en œuvre.
Il convient également de tenir compte de l'évolution des exigences en matière de contrôle. Un petit projet aujourd'hui peut devenir plus complexe demain, et le choix d'un pilote qui prend en charge plusieurs méthodes de contrôle peut faire gagner du temps et de l'argent à long terme.
Conseil #5 : Pensez à l'installation et à l'assistance future

Même un pilote parfaitement adapté peut être source de frustration si l'installation ou l'assistance à long terme ne sont pas prises en compte.
Les conducteurs ne sont pas tous aussi faciles à installer les uns que les autres
Tous les pilotes ne sont pas égaux en ce qui concerne l'installation et la configuration initiale. Certains doivent être réglés manuellement et les paramètres doivent être ajustés avec soin. Si le réglage manuel peut apporter de la souplesse, il peut aussi prendre du temps et être source d'erreurs si l'opérateur n'est pas expérimenté.
D'autres pilotes de moteur sont également accompagnés d'outils logiciels. Ces outils guident les utilisateurs tout au long du processus de configuration et permettent d'ajuster les paramètres graphiquement ou automatiquement en fonction des spécifications du moteur.
Certains pilotes sont également préréglés pour des modèles de moteurs spécifiques. Cela peut simplifier considérablement le déploiement. En utilisant ces options, une configuration de base sera souvent suffisante pour démarrer le moteur en toute sécurité.
Envisager l'entretien et le dépannage
Fiabilité à long terme dépend de la facilité d'entretien et de la disponibilité des fonctions de diagnostic.
Les pilotes dotés de fonctions de diagnostic intégrées peuvent alerter les utilisateurs en cas de surintensité ou d'alerte thermique. Cela peut aider les ingénieurs à identifier et à corriger les problèmes rapidement. Micrologiciel soutien et la documentation sont tout aussi importants.
Quand il est plus judicieux de choisir une paire de moteurs et d'entraîneurs de la même société
Dans de nombreux cas, l'achat d'un moteur et d'un pilote assortis auprès du même fabricant offre des avantages. Les ensembles appariés sont souvent optimisés pour la performance et garantissent que les courbes de couple et les manipulations de courant s'alignent parfaitement.
Il est sans aucun doute possible de mélanger et d'assortir les deux (moteur et pilote) provenant de différents fabricants. Toutefois, cela peut entraîner des problèmes cachés tels que des charges thermiques inattendues.
DMKE propose des produits conçus pour fonctionner ensemble de manière transparente. Ces ensembles adaptés réduisent la complexité de l'installation et offrent des performances fiables.
Exemple de marche à suivre

L'application de ces cinq conseils dans le monde réel permet d'illustrer la manière dont les différentes priorités influencent la sélection des conducteurs.
Scénario 1 : une petite bande transporteuse nécessitant une vitesse stable
Pour un petit convoyeur à bande transportant des articles légers, le facteur dominant est une vitesse stable et prévisible.
En utilisant le conseil 1, vous pouvez vous assurer que la plage de puissance du pilote correspond au moteur. De même, le conseil 2 vous aidera à sélectionner la bonne méthode de contrôle qui, dans ce cas, peut être un simple pilote sans capteur ou un pilote avec capteur à effet Hall.
Les caractéristiques de protection (du conseil 3) sont moins cruciales ici, mais il est bon de les noter. Une simple interface PWM ou analogique (conseil 4) est généralement suffisante, et des pilotes préréglés (conseil 5) minimisent le temps d'installation et permettent au convoyeur de fonctionner de manière fiable.
Scénario 2 : moteur de roue d'un robot de service
Un robot de service présente des exigences plus élevées. Le couple de démarrage et la réactivité sont critiques, ce qui rend les conseils n° 1 et 2 très pertinents.
Le moteur doit accélérer rapidement et gérer les changements soudains de charge sans caler. Les interfaces de contrôle basées sur la communication (Conseil 4) deviennent très importantes car plusieurs moteurs peuvent avoir besoin de se coordonner.
Un module moteur + pilote intégré est-il une meilleure option ?
Un module moteur et pilote intégré peut simplifier considérablement la conception du système. En combinant l'électronique du moteur et du pilote, les ingénieurs peuvent réduire la complexité du câblage et minimiser les erreurs d'installation.
Ces modules sont souvent préréglés et permettent un fonctionnement immédiat sans configuration approfondie. Ils sont donc idéaux pour les appareils compacts ou les prototypes de nouveaux appareils.
Cependant, les solutions intégrées ne sont pas toujours le meilleur choix. Elles peuvent limiter la flexibilité si l'application nécessite sur mesure ou de futures mises à jour.
DMKE répond à ces besoins en proposant des pilotes de haute qualité qui offrent une grande flexibilité. Les ingénieurs peuvent ainsi choisir la configuration qui correspond aux exigences de leur application sans faire de compromis.
Conclusion
Le choix du bon pilote de moteur transforme un moteur BLDC d'un simple composant en un système fiable et réactif.
En fin de compte, le ‘meilleur’ pilote sera celui qui correspond à votre moteur ainsi qu'à l'environnement opérationnel et aux exigences de votre application.
Pour les équipes qui cherchent à simplifier la sélection ou à vérifier la compatibilité, DMKE Les ingénieurs sont disponibles pour fournir des conseils et une assistance.