La robotique moderne évolue vers des systèmes plus petits, plus rapides et plus efficaces, car les industries exigent une plus grande productivité dans des espaces limités. Des ateliers de fabrication aux environnements médicaux, on attend désormais des bras robotisés qu'ils offrent précision et flexibilité sans occuper un espace excessif. Les systèmes de mouvement traditionnels ont souvent du mal à répondre à ces exigences en raison de composants encombrants et d'un câblage complexe. conception robotique compacte une priorité croissante pour les ingénieurs.
Les systèmes d'asservissement classiques reposent généralement sur des moteurs, des variateurs et des unités de commande distincts, répartis sur l'ensemble du système robotique. Cette architecture augmente le poids, consomme un espace précieux et complique l'installation, en particulier dans les bras robotiques à plusieurs axes. Au fur et à mesure que les applications robotiques deviennent plus avancées, ces limitations peuvent réduire les performances et restreindre la flexibilité de la conception, ce qui crée des difficultés pour atteindre les objectifs suivants une intégration efficace des systèmes.
Les servomoteurs intégrés offrent une solution en combinant plusieurs composants de contrôle de mouvement en une seule unité compacte. Cette approche réduit les besoins en matériel, simplifie le câblage et permet de rationaliser les structures robotiques sans compromettre la précision ou le contrôle. Par conséquent, les servomoteurs intégrés sont de plus en plus utilisés dans les bras robotiques dans les cas suivants une efficacité qui permet de gagner de la place et la performance doivent aller de pair.
Cet article explique pourquoi les servomoteurs intégrés sont essentiels pour la conception de bras robotiques compacts. Il aborde leur rôle dans la robotique moderne, leurs principaux avantages et la manière de sélectionner la bonne solution pour différentes applications.
Comprendre les servomoteurs intégrés dans les systèmes robotiques
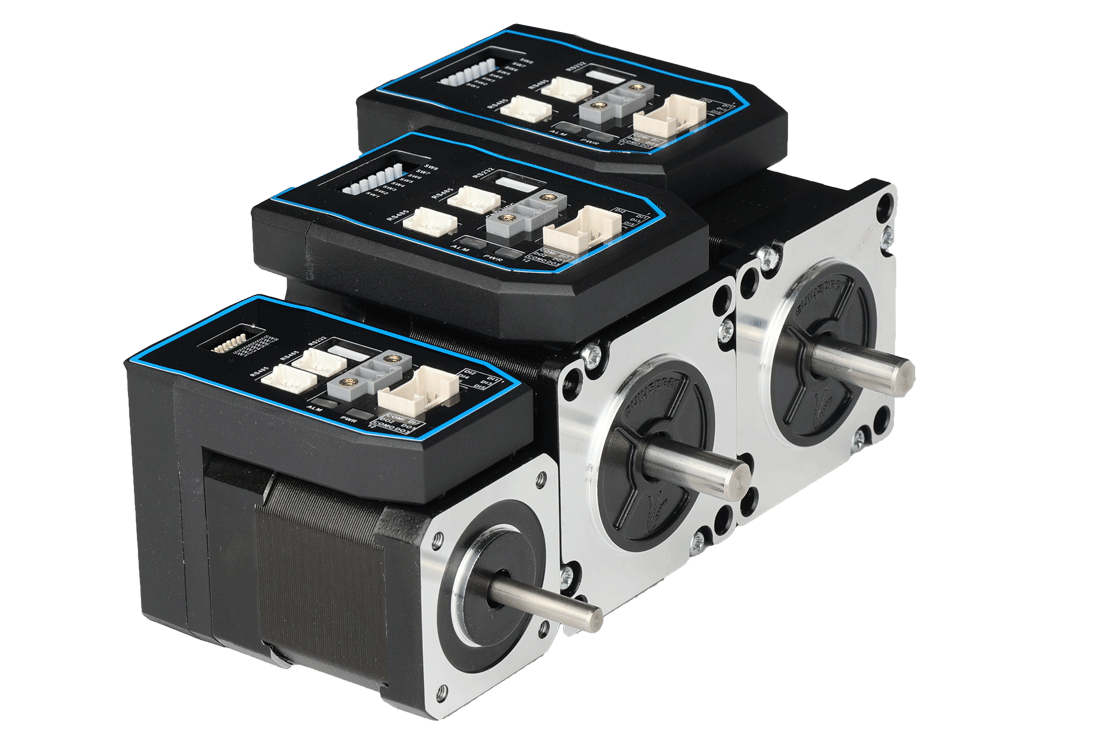
Dans les applications robotiques, les servomoteurs sont des unités de mouvement compactes qui combinent le moteur, l'entraînement, l'encodeur et l'électronique de commande en un seul ensemble. Au lieu de répartir ces composants sur différentes parties du système robotique, les ingénieurs peuvent utiliser une seule unité de mouvement. unité de mouvement autonome à chaque articulation, ce qui simplifie la conception mécanique et électrique.
Bras robotiques traditionnels s'appuient souvent sur des servomoteurs externes reliés par des câbles à des moteurs individuels. Cette configuration augmente la complexité du câblage et alourdit le système, en particulier pour les robots multi-axes. En utilisant des servomoteurs intégrés, les concepteurs peuvent réduire le nombre de composants externes, ce qui se traduit par architecture robotique simplifiée et l'amélioration de l'efficacité globale du système.
Ces moteurs sont généralement montés directement dans les articulations robotiques, ce qui permet de contrôler le mouvement exactement là où il est nécessaire. Ce positionnement réduit les délais de transmission des signaux et améliore la réactivité, ce qui est essentiel dans les applications nécessitant un positionnement précis. Alors que la robotique continue d'évoluer vers des systèmes compacts et performants, les servomoteurs intégrés soutiennent un contrôle efficace au niveau des articulations dans des designs modernes.
Un autre avantage est la modularité. Chaque articulation équipée d'un servomoteur intégré peut fonctionner comme un module de mouvement indépendant, ce qui facilite la mise à l'échelle, la modification ou la maintenance des bras robotiques. Cette approche modulaire s'aligne sur les tendances actuelles en matière d'automatisation, où la flexibilité et l'adaptabilité sont essentielles. systèmes robotiques évolutifs pour différents besoins industriels.
Comment les servomoteurs intégrés permettent de concevoir des bras robotiques compacts
La conception d'un bras robotique compact dépend de la minimisation de la taille des composants, réduire la complexité du câblage, et l'optimisation de la répartition du poids sur plusieurs articulations. Les servomoteurs intégrés jouent un rôle central dans la réalisation de ces objectifs en regroupant les éléments de contrôle du mouvement en une seule unité. Cela permet aux ingénieurs de concevoir des systèmes robotiques plus petits, plus légers et plus efficaces, tout en conservant des performances élevées, ce qui rend les systèmes robotiques plus performants. robotique à faible encombrement une réalité pratique.
Réduction de l'empreinte des composants dans les articulations robotisées
L'un des principaux avantages des servomoteurs intégrés est la réduction des composants physiques nécessaires à chaque articulation robotique. Les systèmes traditionnels nécessitent des variateurs externes, des encodeurs et du matériel de commande qui occupent de l'espace dans la machine ou l'armoire de commande. En intégrant ces éléments directement dans le moteur, les concepteurs peuvent réduire de manière significative la taille des articulations et créer des systèmes de contrôle et de commande plus performants. structures de joints compactes qui améliorent la géométrie globale du bras.
Des articulations plus petites permettent également une articulation plus serrée et une meilleure portée dans les environnements confinés. Cela est particulièrement utile dans des applications telles que l'assemblage électronique ou la robotique médicale, où les contraintes d'espace sont cruciales. La réduction de l'encombrement des composants permet aux ingénieurs de concevoir des bras robotiques à la fois compacts et très fonctionnels.
Câblage simplifié pour les bras robotiques multiaxes

Les bras robotiques multiaxes impliquent généralement des systèmes de câblage complexes reliant les moteurs, les entraînements, les capteurs et les contrôleurs. Ce câblage augmente non seulement le temps d'assemblage, mais introduit également des points de défaillance potentiels. Les servomoteurs intégrés réduisent la nécessité d'un câblage important en intégrant l'électronique de commande dans le moteur, ce qui se traduit par réduction de la complexité du câblage dans l'ensemble du système robotique.
La simplification du câblage améliore la fiabilité et facilite la maintenance, car il y a moins de connexions à inspecter ou à réparer. Elle contribue également à une disposition interne plus propre, ce qui est important pour les conceptions robotiques compactes où l'espace est limité.
Conception légère et optimisation de la charge
Le poids joue un rôle essentiel dans les performances des bras robotisés, en particulier dans les systèmes articulés où chaque articulation doit supporter la charge des segments suivants. Les servomoteurs intégrés contribuent à réduire le poids total du système en éliminant le besoin de variateurs séparés et de câblage lourd. Cela permet de créer un une structure robotique plus légère, L'efficacité énergétique et la réactivité des mouvements s'en trouvent améliorées.
Un poids plus faible améliore également la capacité de charge utile, permettant au bras robotique de transporter des outils ou des composants plus lourds sans compromettre les performances. Cet équilibre entre poids et puissance est essentiel pour optimiser l'efficacité des robots dans les environnements industriels.
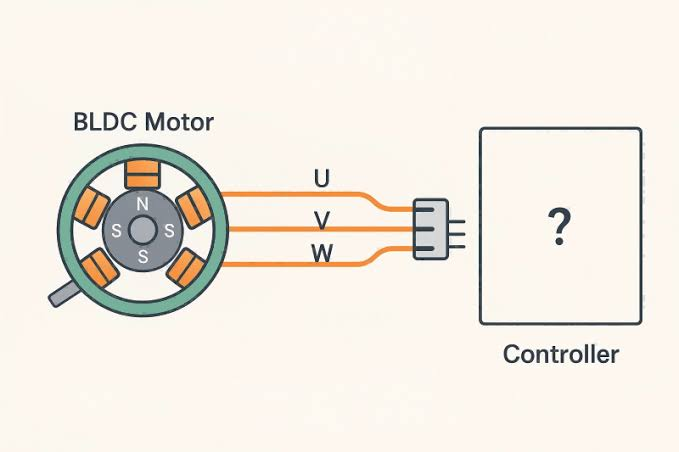
Architecture décentralisée de contrôle des mouvements
Intégré servomoteurs permettent un contrôle décentralisé en plaçant l'électronique d'entraînement directement dans chaque moteur. Cela réduit la dépendance à l'égard des grandes armoires de commande centralisées et permet à chaque articulation de fonctionner comme un nœud de mouvement indépendant. Une telle architecture permet contrôle de mouvement distribué, améliorant ainsi la flexibilité et l'évolutivité du système.
Les systèmes décentralisés simplifient également la conception des machines et permettent d'étendre ou de modifier plus facilement les bras robotiques. Pour les équipementiers et les automaticiens, cette approche offre une plus grande liberté de conception tout en maintenant des niveaux élevés de contrôle, de précision et de performance du système.
Servomoteurs traditionnels et servomoteurs intégrés dans les bras robotisés
| Fonctionnalité | Système d'asservissement traditionnel | Servomoteurs intégrés |
| Configuration des composants | Séparer le moteur, l'entraînement et l'encodeur | Unité intégrée tout-en-un |
| Complexité du câblage | Élevé | Faible |
| Taille de l'articulation | Plus grand | Compact |
| Répartition du poids | Plus lourd en raison des composants externes | Léger et optimisé |
| Installation | Complexe et chronophage | Plus rapide et plus simple |
| Architecture du système | Centralisé | Décentralisé |
Principaux avantages de l'utilisation de servomoteurs intégrés dans les bras robotisés
Les servomoteurs intégrés offrent plusieurs avantages qui améliorent directement bras robotique conception, performance et fiabilité à long terme. En combinant les composants de commande de mouvement en une seule unité, ces systèmes réduisent la complexité tout en améliorant l'efficacité opérationnelle, ce qui les rend parfaitement adaptés aux environnements d'automatisation modernes qui exigent des systèmes compacts et efficaces.
L'un des principaux avantages est la réduction du temps d'installation. Avec moins de composants à monter et à connecter, les ingénieurs peuvent assembler les bras robotiques plus rapidement et avec moins d'erreurs. Ce processus rationalisé réduit les efforts de main-d'œuvre et simplifie la mise en service, ce qui se traduit par un déploiement plus rapide du système dans les environnements de production.
Un autre avantage important est l'amélioration de la précision du mouvement. Les servomoteurs intégrés permettent un positionnement plus précis car l'électronique de commande est située plus près du moteur, ce qui réduit les délais de transmission des signaux et améliore le temps de réponse. Cela garantit un fonctionnement plus souple et une meilleure synchronisation entre les différentes articulations, ce qui permet d'améliorer la qualité de vie des utilisateurs. mouvement robotique de haute précision dans des applications exigeantes.
Les exigences en matière de maintenance sont également beaucoup plus faibles. Les systèmes traditionnels comportent de multiples composants qui peuvent s'user ou tomber en panne au fil du temps, alors que les conceptions intégrées réduisent ces points de défaillance. Cela permet d'améliorer le temps de fonctionnement et de réduire les interruptions de service, en fournissant un fonctionnement fiable à long terme pour les utilisateurs industriels.
L'évolutivité est un autre avantage clé. Les bras robotiques conçus avec des servomoteurs intégrés peuvent être facilement étendus ou modifiés en ajoutant ou en reconfigurant des modules de mouvement. Cette approche modulaire s'applique aux systèmes de fabrication flexibles où l'adaptabilité est essentielle. solutions robotiques évolutives dans différents cas d'utilisation.
Applications où les bras robotiques compacts nécessitent des servomoteurs intégrés
Les bras robotiques compacts sont largement utilisés dans les industries où l'efficacité de l'espace, la précision et la flexibilité sont essentielles. Les servomoteurs intégrés jouent un rôle crucial en permettant à ces systèmes de fonctionner efficacement dans des espaces limités tout en maintenant des normes de performance élevées, ce qui les rend idéaux pour applications robotiques avancées.
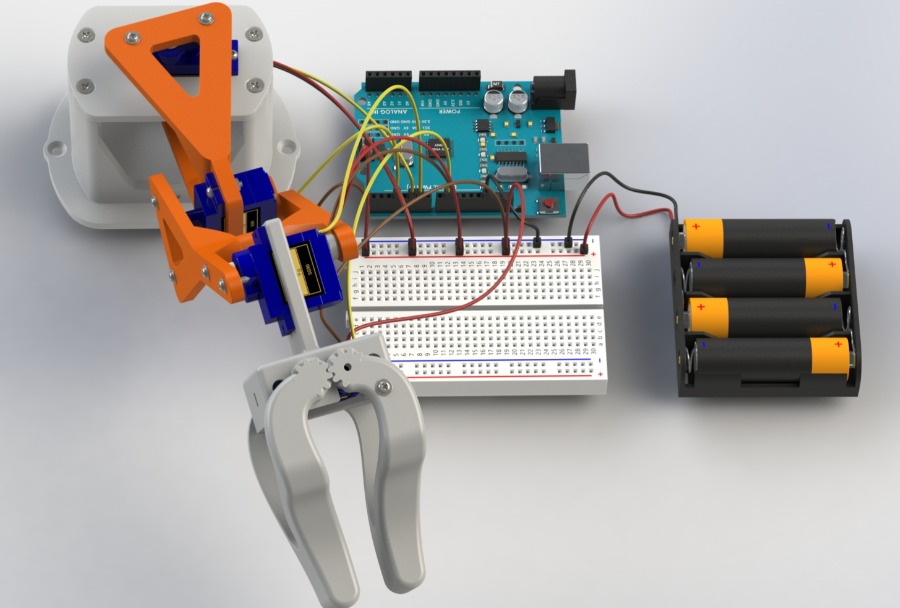
Les robots collaboratifs, ou cobots, s'appuient fortement sur des conceptions compactes et légères pour fonctionner en toute sécurité aux côtés des humains. Les servomoteurs intégrés permettent de réduire la taille et le poids des articulations, améliorant ainsi la mobilité et la réactivité. Cela permet aux cobots de fournir une interaction sûre et efficace dans des espaces de travail partagés.
Dans le domaine de la robotique médicale, la conception compacte est essentielle en raison des contraintes d'espace et des exigences de précision. Les robots chirurgicaux et de diagnostic utilisent des servomoteurs intégrés pour obtenir des mouvements fluides et contrôlés dans des environnements restreints, garantissant ainsi la sécurité des patients. performance de haute précision dans les applications sensibles.
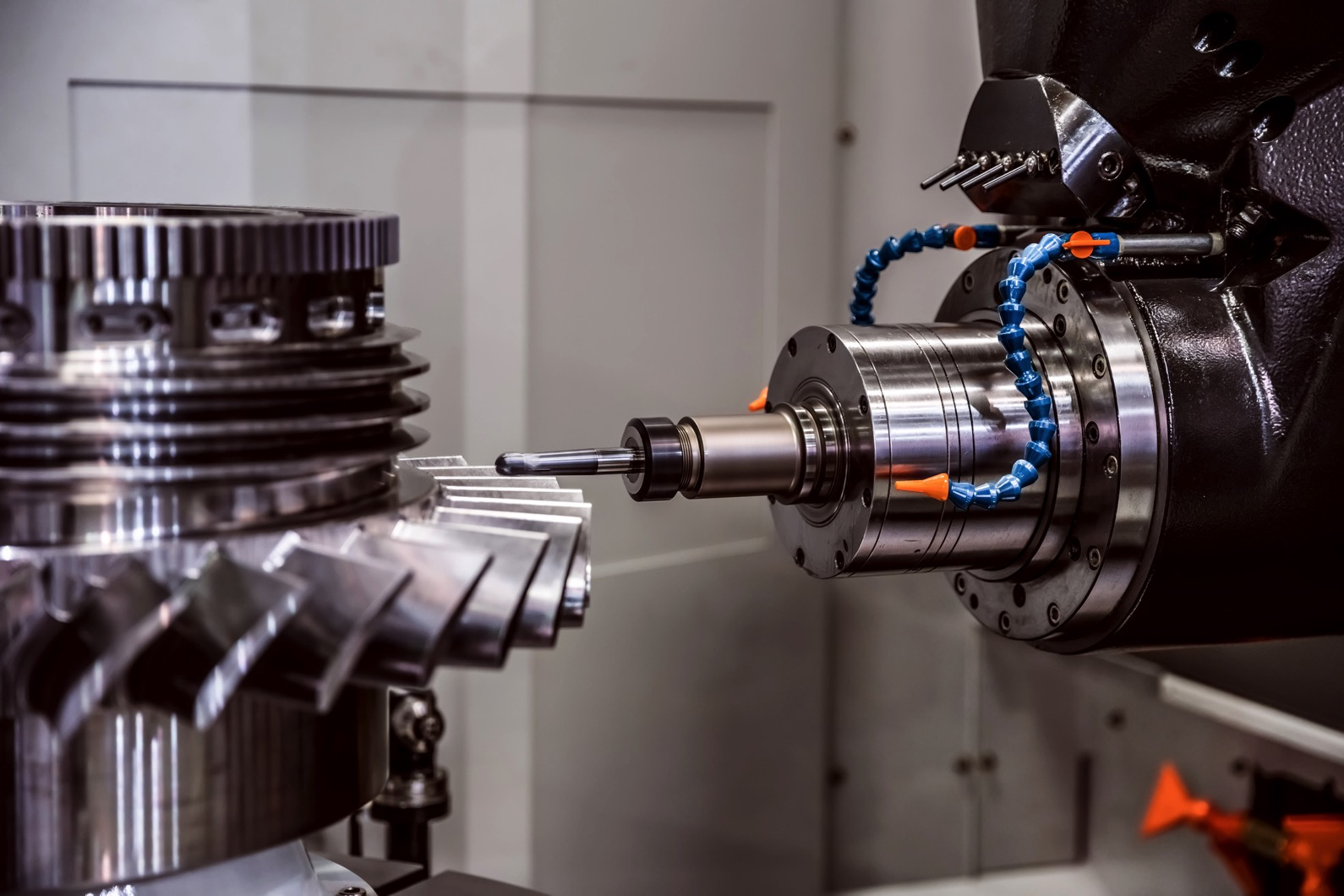
L'assemblage électronique est un autre domaine où les bras robotiques compacts sont essentiels. Ces systèmes doivent manipuler de petits composants avec une extrême précision tout en fonctionnant dans des espaces restreints. Les servomoteurs intégrés fournissent le contrôle et l'efficacité nécessaires à l'assemblage des composants électroniques. manipulation précise des composants dans les lignes de production à haut volume.
Emballage et les systèmes de prise et de dépose bénéficient de cycles de mouvement rapides et répétitifs. Les servomoteurs intégrés permettent une accélération rapide et un positionnement précis, améliorant ainsi le rendement et garantissant la sécurité. un flux de production efficace dans des environnements automatisés.
Les robots de service et les robots mobiles nécessitent également des conceptions compactes et économes en énergie. Les servomoteurs intégrés réduisent le poids et la complexité du système, ce qui permet d'améliorer la mobilité et de prolonger la durée de fonctionnement. un déploiement robotique flexible dans des environnements dynamiques.
Comment choisir des servomoteurs intégrés pour la conception d'un bras robotique ?
Le choix des servomoteurs intégrés pour les bras robotisés nécessite une compréhension détaillée de la dynamique des articulations, de la répartition des charges et des exigences en matière de précision des mouvements. Chaque articulation d'un bras robotisé remplit une fonction spécifique, de sorte que la sélection des moteurs sur la seule base de la taille ou de la puissance nominale peut entraîner des problèmes de performance. Une évaluation structurée garantit une performance optimisée des articulations dans l'ensemble du système robotique.
Les exigences en matière de couple doivent être calculées avec soin pour chaque axe. Les articulations les plus proches de la base supportent généralement des charges plus élevées, tandis que les articulations de l'effecteur exigent plus de précision et de vitesse. La sélection de moteurs sans une analyse correcte du couple peut entraîner une instabilité ou une réduction de la précision. Un dimensionnement correct garantit la manutention de charges équilibrées et un fonctionnement souple sur toute la plage de mouvement du bras.
Les considérations relatives au poids sont tout aussi importantes. Les bras robotisés étant des systèmes à liaisons multiples, l'excès de poids dans une articulation affecte les performances des autres. Les servomoteurs intégrés contribuent à réduire le poids total, mais les acheteurs doivent toujours évaluer la masse du moteur par rapport à la capacité de charge utile. Le maintien d'un équilibre adéquat améliore l'efficacité énergétique et soutient les activités de l'entreprise. mouvement robotique optimisé dans les applications dynamiques.
Les exigences en matière de vitesse et de précision doivent correspondre à l'application envisagée. Les robots de prélèvement et de placement à grande vitesse nécessitent des temps de réponse rapides, tandis que les robots médicaux ou d'inspection requièrent un positionnement extrêmement précis. Le choix de moteurs dotés de systèmes de retour d'information appropriés garantit contrôle précis des mouvements et une répétabilité constante.
Les protocoles de communication et la compatibilité des systèmes doivent également être vérifiés. Les servomoteurs intégrés doivent s'aligner sur le contrôleur et l'architecture réseau du robot afin d'éviter les problèmes d'intégration. S'assurer de la compatibilité des systèmes une communication transparente entre les systèmes et une coordination efficace entre tous les axes de mouvement.
Les performances thermiques et les conditions environnementales ne doivent pas être négligées. Les systèmes robotiques fonctionnant en continu ou dans des environnements difficiles nécessitent des moteurs dotés d'une dissipation thermique et d'une protection adéquates. La prise en compte de ces facteurs permet de maintenir fiabilité opérationnelle à long terme et évite les temps d'arrêt imprévus.
Erreurs de conception courantes dans les systèmes de bras robotiques compacts
La conception de bras robotiques compacts avec des servomoteurs intégrés offre de nombreux avantages, mais une mauvaise mise en œuvre peut limiter les performances et réduire l'efficacité du système. Il est essentiel d'éviter les erreurs les plus courantes pour atteindre les objectifs suivants un fonctionnement robotique fiable et de maximiser les avantages d'une conception compacte.
Une erreur fréquente consiste à ne pas tenir compte de la répartition du poids sur le bras robotisé. Même avec des moteurs compacts, une répartition inégale du poids peut créer de l'instabilité et augmenter le stress sur certaines articulations. Une conception correcte garantit une conception structurelle équilibrée, améliorant à la fois les performances et la durabilité.
Un autre problème est la mauvaise planification de la gestion des câbles. Bien que les servomoteurs intégrés réduisent le câblage, certaines connexions sont toujours nécessaires. Un mauvais acheminement peut entraîner de l'usure, des interférences de signaux ou une limitation des mouvements. Une disposition organisée garantit acheminement efficace des câbles et une fiabilité à long terme.
Le sous-dimensionnement de la capacité de couple est également un problème fréquent. Les concepteurs qui visent des systèmes plus petits peuvent choisir des moteurs qui ne peuvent pas supporter les charges de fonctionnement réelles. Cela entraîne une surchauffe, une réduction de la durée de vie et une limitation des performances. Des calculs corrects garantissent capacité de couple adéquate pour tous les scénarios de mouvement.
La gestion thermique est souvent sous-estimée dans les conceptions compactes. Les systèmes intégrés génèrent de la chaleur dans un espace réduit et, en l'absence d'un système de refroidissement adéquat, les performances peuvent se dégrader. La prise en compte de ce problème permet de garantir performance thermique stable en fonctionnement continu.
Enfin, l'absence de conception modulaire peut limiter la flexibilité. Les systèmes robotiques qui ne sont pas conçus dans une optique d'évolutivité deviennent difficiles à mettre à niveau ou à modifier. L'utilisation de servomoteurs intégrés dans le cadre d'une approche modulaire permet de l'expansion future du système et simplifie le développement du système à long terme.
Pourquoi les servomoteurs intégrés sont essentiels pour la prochaine génération de robots
La robotique de nouvelle génération évolue rapidement vers des systèmes plus intelligents, plus petits et plus adaptables aux environnements industriels dynamiques. Qu'il s'agisse de robots collaboratifs ou de plateformes d'automatisation pilotées par l'IA, les conceptions robotiques modernes nécessitent des systèmes de mouvement qui offrent une grande précision tout en occupant un espace minimal. Les servomoteurs intégrés sont en train de devenir un élément fondamental de cette évolution car ils permettent mouvement compact et intelligent sans la complexité des architectures traditionnelles.
L'un des principaux moteurs est la poussée vers la miniaturisation. Les industries telles que la robotique médicale, la fabrication électronique et la robotique de service exigent des machines plus petites capables de fonctionner dans des environnements restreints. Les configurations servo traditionnelles, avec des entraînements séparés et un câblage important, limitent la compacité d'un système robotique. Les servomoteurs intégrés éliminent ces contraintes en combinant les éléments de contrôle du mouvement en une seule unité, ce qui permet aux ingénieurs de concevoir des systèmes robotisés plus compacts. systèmes robotiques à haute densité qui maintiennent les performances tout en réduisant la taille globale.
L'intelligence artificielle et les algorithmes de contrôle avancés sont également en train de remodeler la robotique. On attend des robots modernes qu'ils s'adaptent en temps réel, qu'ils traitent des données provenant de multiples capteurs et qu'ils exécutent des tâches complexes avec une grande précision. Les servomoteurs intégrés soutiennent cette évolution en permettant une communication plus rapide entre l'électronique de commande et le moteur lui-même. Avec des chemins de signaux plus courts et des capacités de contrôle intégrées, ces systèmes fournissent réponse au mouvement en temps réel, ce qui est essentiel pour la prise de décision basée sur l'IA et le comportement précis des robots.
Un autre facteur important est la demande croissante de plateformes robotiques modulaires et évolutives. Les fabricants conçoivent de plus en plus des robots qui peuvent être facilement reconfigurés ou étendus pour différentes applications. Les servomoteurs intégrés permettent à chaque articulation de fonctionner comme une unité de mouvement indépendante, ce qui simplifie l'architecture du système et permet des configurations flexibles. Cette approche permet développement de la robotique modulaire, réduisant ainsi le temps de conception et améliorant l'adaptabilité à de multiples cas d'utilisation.
L'efficacité énergétique devient également un élément essentiel de la robotique de nouvelle génération. Les robots fonctionnant en continu dans des environnements de production, il est essentiel de réduire la consommation d'énergie sans sacrifier les performances. Les servomoteurs intégrés améliorent l'efficacité en minimisant les pertes de puissance associées aux longs câbles et aux composants distribués. Il en résulte une utilisation optimisée de l'énergie, contribuant ainsi à réduire les coûts d'exploitation et à rendre les systèmes d'automatisation plus durables.
Enfin, les servomoteurs intégrés s'alignent étroitement sur les objectifs de l'industrie 4.0 et de la fabrication intelligente. Les environnements de production modernes s'appuient sur des systèmes connectés, un contrôle décentralisé et une surveillance en temps réel. Les solutions de mouvement intégrées permettent des architectures distribuées où chaque articulation robotique contribue à l'intelligence globale du système. Cela permet de prendre en charge écosystèmes d'automatisation connectés qui sont plus réactifs, plus évolutifs et plus efficaces.
Choisir la bonne solution d'asservissement intégrée pour les bras robotisés avec l'aide d'un expert
Le choix des servomoteurs intégrés pour les bras robotisés nécessite une approche équilibrée tenant compte des performances, des contraintes d'espace et de la fiabilité à long terme. Les acheteurs qui évaluent soigneusement le couple, la vitesse, les conditions thermiques et la compatibilité du système peuvent obtenir les résultats suivants une performance robotique optimale sans compromettre les objectifs de conception compacte.
Une sélection basée sur l'ingénierie est essentielle pour éviter les problèmes de sous-dimensionnement, de surchauffe ou d'intégration. Un système correctement adapté garantit des mouvements fluides, un contrôle précis et un fonctionnement fiable pour toutes les fonctions robotiques, offrant ainsi des résultats fiables à long terme dans des environnements exigeants.
À DMKE, Nous soutenons les acheteurs industriels grâce à une ingénierie axée sur les applications, des tests rigoureux, et capacités de personnalisation pour répondre à des exigences robotiques spécifiques. Nos servomoteurs intégrés sont conçus pour fournir fiabilité des performances tout en favorisant des conceptions robotiques compactes et efficaces.
Pour les projets nécessitant des solutions de contrôle de mouvement avancées, visitez notre site web ou contactez-nous dès aujourd'hui pour bénéficier de conseils d'experts et de recommandations sur mesure. Notre équipe est prête à vous aider à mettre en œuvre des solutions d'asservissement efficaces qui correspondent à vos objectifs d'automatisation.