Selecting the right servo motor is never just about choosing speed or motor size. In industrial automation, the real performance difference often comes down to one critical factor: servo motor torque. Whether the application involves robotics, CNC systems, packaging machinery, or conveyor automation, incorrect torque sizing can lead to overheating, unstable motion, excessive energy use, and unexpected equipment failure.
Many buyers focus heavily on RPM ratings while overlooking how much turning force the system actually requires under real operating conditions. A motor that appears powerful on paper may still fail if it cannot handle peak load demands, acceleration forces, or repeated start-stop cycles. At the same time, oversizing creates unnecessary costs, larger system footprints, and lower efficiency. This makes proper torque sizing one of the most important engineering decisions in motion control design.
Servo motor torque directly affects positioning accuracy, response speed, and long-term reliability. It determines how smoothly a machine handles load changes, maintains precision, and performs under continuous operation. In applications where downtime is expensive, choosing the correct torque capacity is not simply a technical preference but a major factor in protecting productivity and equipment lifespan through stable system performance.
Different industries place different demands on torque selection. A robotic arm lifting variable payloads requires very different torque behaviour compared to a packaging line performing thousands of rapid repetitive cycles every day. Understanding these operational differences helps buyers avoid underperforming systems and supports application-specific sizing instead of relying on generic motor selection.
Another challenge is balancing continuous torque and peak torque requirements. Many systems perform well under average loads but fail during sudden acceleration or heavy startup conditions. Ignoring these moments can shorten motor lifespan and create maintenance issues. Engineers must evaluate both operating ranges to ensure long-term reliability and efficient production performance.
This guide explains how to calculate the required torque for a servo motor, how the 90–10 rule helps with practical sizing decisions, and how engineers measure torque in real applications. The goal is to help industrial buyers understand servo motor torque clearly so they can make confident, cost-effective decisions when selecting motion control systems with better engineering confidence. So, keep reading:
What Is Servo Motor Torque?
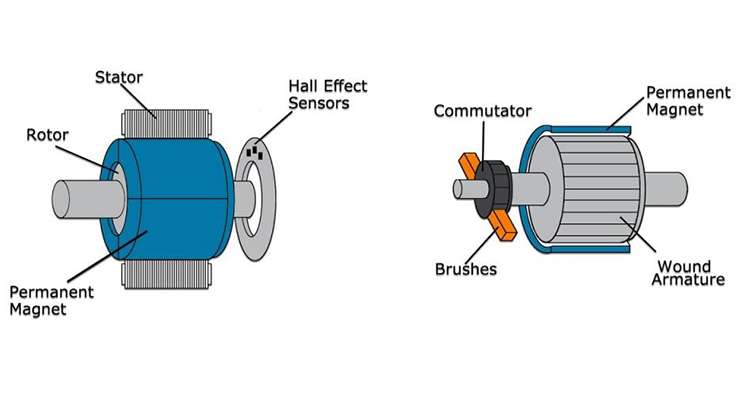
Servo motor torque refers to the rotational force a servo motor produces to move, hold, or control a mechanical load. In simple terms, it is the turning power that allows the motor to rotate a shaft, lift a load, or maintain precise positioning under resistance. Understanding servo motor torque is essential because it directly determines how effectively a system performs in real industrial applications.
Many buyers confuse torque with speed, but both serve different purposes. Speed refers to how fast the motor rotates, while torque defines how much force it can apply during that movement. A motor may have high RPM but still fail if it cannot generate enough turning force for the load. This is why load handling capability matters more than speed alone in many automation systems.
Torque also differs from overall motor power. Power combines both speed and torque, but in servo applications, torque often becomes the deciding factor because precision and controlled force are critical. In robotics, CNC machines, and conveyor systems, insufficient torque can cause unstable movement, positioning errors, or complete operational failure, reducing system performance reliability over time.
Another important distinction is between continuous torque and peak torque. Continuous torque is the amount of force the motor can safely deliver over long operating periods without overheating. Peak torque refers to the short bursts of higher force needed during acceleration, sudden load changes, or startup conditions. Selecting the right balance between both values ensures stable motor operation without unnecessary overload risks.
For industrial buyers, understanding torque is not just a technical detail but a purchasing decision that affects efficiency, maintenance costs, and equipment lifespan. Choosing the correct servo motor torque helps improve motion accuracy, reduce downtime, and support long-term productivity with better motion control across the entire system.
How Do You Calculate the Torque Needed for a Servo?
Calculating the correct servo motor torque starts with understanding the real mechanical demands of the application. Buyers should not rely only on catalogue ratings because every machine has different load conditions, motion profiles, and operating environments. Proper calculation helps prevent undersizing or oversizing, ensuring accurate motor selection for long-term industrial performance.
Understanding Load Requirements
The first step is identifying the total load the servo motor must move or control. This includes the weight of the object being moved, the mechanical structure connected to the motor, and any external resistance such as friction or gravity. Applications involving vertical lifting require more torque than horizontal movement because the motor must continuously work against gravity, creating a higher load demand during operation.
It is also important to separate static load and dynamic load conditions. Static load refers to the force needed to hold a position, while dynamic load includes acceleration, deceleration, and movement changes during operation. Ignoring dynamic conditions often leads to incorrect calculations and weak performance under real working conditions. Evaluating both ensures balanced torque planning for stable system operation.
Calculating Acceleration and Required Force
Acceleration has a major impact on servo motor torque because the motor must generate additional force to start and stop movement quickly. High-speed automation systems, such as packaging lines or robotic arms, often require strong acceleration torque even if the average load seems small. This makes motion profile analysis critical during motor selection.
Frequent start-stop cycles also increase torque demand. A machine running continuously at a stable speed may need less peak torque than one performing rapid repetitive positioning tasks. Engineers should calculate acceleration force carefully to avoid sudden overloads and maintain smooth production performance across different operating conditions.
Converting Force Into Servo Motor Torque
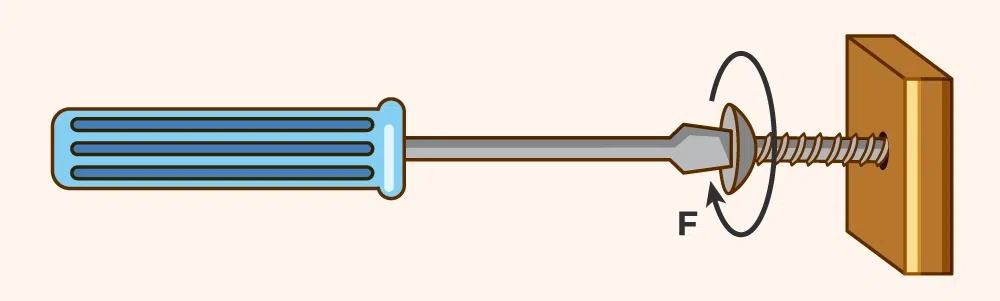
Once the required force is known, it must be converted into torque using the basic relationship between force and radius. The standard formula is based on force multiplied by the distance from the rotation centre, which helps determine the actual turning force needed at the shaft.
T=F×rT = F \times rT=F×r
Where T represents torque, F is force, and r is the radius or lever arm. A larger radius increases torque demand even if the load remains the same. This is why pulley size, gear diameter, and arm length directly affect servo motor torque calculations in practical applications.
Continuous Torque vs Peak Torque Selection
Selecting torque is not only about maximum force requirements. Buyers must compare both continuous torque and peak torque values to ensure the motor performs safely across all operating conditions. Continuous torque protects against overheating during long operation, while peak torque handles short bursts during startup or acceleration, providing safe load management over time.
Choosing a motor based only on peak torque can create thermal problems, while focusing only on continuous torque may cause failure during sudden load spikes. A balanced evaluation of both values ensures long-term reliability and helps avoid expensive downtime or premature motor replacement.
Load Type vs Torque Requirement Comparison
| Load Type | Torque Requirement | Buyer Consideration |
| Horizontal Movement | Moderate | Focus on friction and acceleration |
| Vertical Lifting | High | Must overcome gravity continuously |
| Start Stop Cycles | High Peak Torque | Important for packaging and robotics |
| Continuous Rotation | Stable Continuous Torque | Thermal management is critical |
| Variable Payload Systems | Mixed Torque Demand | Requires a safety margin in sizing |
How Do You Determine How Much Torque Is Needed for a Motor?
Determining how much torque is needed for a motor requires a practical evaluation of how the machine actually operates, not just theoretical load values. Buyers must consider the working environment, movement frequency, payload changes, and production speed expectations to ensure real-world motor sizing that supports reliable performance.
The first step is analysing the application itself. A conveyor moving light materials continuously will require a different torque profile compared to a robotic arm lifting heavy parts with sudden acceleration. Understanding the type of motion helps engineers identify whether the system needs stable continuous torque or strong short-term peak torque for demanding cycles.
Speed and load balancing are other major factors. Increasing speed often changes torque demand because the motor must handle both motion and force requirements together. Selecting a motor with the right balance prevents energy waste and improves efficient system performance without oversizing the entire drive system.
Duty cycle also plays an important role. Motors operating for long hours under constant load need stronger continuous torque ratings, while systems with short operating bursts may rely more on peak torque values. Ignoring duty cycle often leads to overheating problems and reduced motor lifespan, making thermal performance planning essential.
Most industrial buyers also apply a safety margin during selection. Instead of choosing a motor that matches the exact calculated demand, engineers often add 20 to 30 per cent additional capacity to handle unexpected load changes and future operating variations. This creates better operational stability and reduces the risk of premature system failure.
How Do I Calculate How Much Torque I Need?
Calculating how much torque you need begins with understanding the actual working conditions of the machine rather than relying only on motor catalogue values. Buyers should look at load weight, movement type, acceleration demands, and operating frequency to ensure practical torque estimation for real industrial performance.
The first step is identifying the total load the motor must move. This includes not only the product or payload but also fixtures, arms, pulleys, and any mechanical resistance within the system. Friction, gravity, and external forces must all be included because they directly increase the required turning force during operation.
Next, the movement style must be considered. A system that lifts vertically will require more torque than one moving horizontally because gravity adds constant resistance. Likewise, machines with rapid start-stop cycles demand stronger peak torque than systems running at a stable speed. Evaluating motion conditions supports accurate load calculation and prevents undersizing.
Acceleration is another major factor. Faster acceleration requires more force because the motor must overcome inertia quickly. In packaging lines, robotics, and indexing systems, acceleration often creates more torque demand than the actual load itself. This makes dynamic force analysis critical for correct motor selection.
After force is identified, it is converted into torque using the radius of the rotating part, such as a pulley, wheel, or arm. A larger radius increases the torque needed even when the same load is applied. This simple relationship helps engineers create reliable sizing decisions for practical machine design.
Finally, a safety margin should always be added. Most industrial applications require extra capacity to handle sudden load changes, wear over time, and unexpected production demands. Adding this margin improves long-term motor reliability and protects the system from overload-related failures.
Quick Torque Calculation Checklist
| Selection Step | What to Check | Why It Matters |
| Load Weight | Product + fixtures + resistance | Defines the base torque needed |
| Movement Type | Horizontal or vertical motion | Changes the gravity impact |
| Acceleration | Start-stop speed changes | Affects peak torque demand |
| Radius | Pulley, gear, or arm length | Directly impacts torque |
| Duty Cycle | Continuous or intermittent use | Determines thermal limits |
| Safety Margin | Extra capacity reserve | Prevents overload issues |
What Is the 90–10 Rule of Torque?
The 90–10 rule of torque is a practical guideline used in motor selection to avoid oversizing. It means that most systems operate around 90 per cent of the time under normal load and only about 10 per cent under peak load conditions. This helps buyers focus on actual operating demand instead of selecting motors only for rare maximum load situations.
Many buyers choose larger motors based only on peak torque requirements, which increases cost, energy use, and system size. The 90–10 rule encourages engineers to prioritise continuous torque performance while still ensuring enough peak torque for short bursts like startup or sudden load changes.
This approach improves efficiency, reduces overheating risks, and supports balanced motor selection for better long-term reliability in industrial automation systems.
How Do You Measure Servo Torque?
Measuring servo motor torque helps engineers verify whether the motor is performing within its designed operating range. It allows buyers to compare rated torque with actual working conditions and identify overload risks before they cause failure. Proper measurement supports stable system performance and improves long-term reliability.
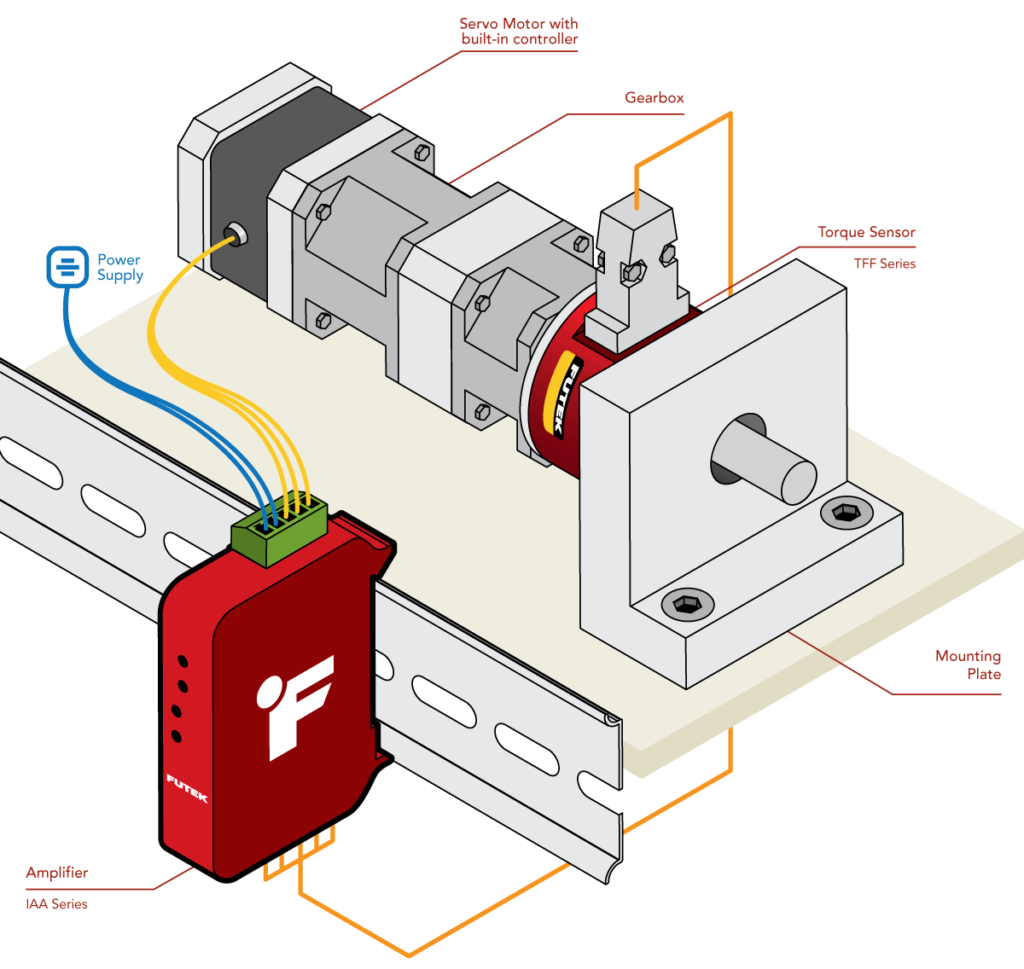
One common method is using torque sensors or torque transducers installed directly on the shaft or drive system. These devices measure real-time turning force during operation and provide accurate performance data. This helps engineers monitor actual load conditions instead of relying only on theoretical calculations.
Servo drives also provide torque feedback through control systems. Many modern drives display real-time torque values based on current and load response, allowing operators to track performance without external measuring tools. This improves maintenance planning and supports predictive system monitoring.
Comparing rated torque with measured operating torque helps prevent overheating and unexpected breakdowns. If the motor regularly operates near or above its limit, resizing or system adjustment may be necessary. Regular torque measurement ensures long-term operational safety and better motion control efficiency.
Common Mistakes When Selecting Servo Motor Torque
Selecting servo motor torque incorrectly can create serious performance problems, even when the motor itself is high quality. Many failures happen because buyers focus only on speed or motor size without fully understanding load behaviour. Avoiding these mistakes helps achieve reliable system operation and better long-term efficiency.
One common mistake is oversizing the motor. Many buyers assume a larger motor is always safer, but excessive torque capacity increases cost, energy consumption, and system size without improving actual performance. Proper sizing ensures efficient motor utilisation instead of unnecessary overspending.
Another major issue is ignoring the acceleration load. Some systems appear light under normal conditions but require high peak torque during startup, stopping, or rapid direction changes. If this is not calculated correctly, the motor may fail under real operating conditions, reducing stable production performance.
Underestimating peak torque is also risky. A motor selected only for continuous operation may overheat or lose precision when sudden load spikes occur. Engineers must evaluate both continuous and peak requirements to maintain safe load handling across all motion cycles.
Many buyers also forget thermal limits. Even if torque values seem correct, poor heat management can shorten motor lifespan and create downtime. Proper thermal planning supports long-term reliability and protects investment in industrial automation systems.
Choose the Right Servo Motor Solution With Expert Engineering Support – Connect With DMKE
Selecting the correct servo motor torque is one of the most important decisions in motion control design. Proper torque sizing improves positioning accuracy, reduces overheating risks, and ensures smooth machine operation under real working conditions. Buyers who evaluate load requirements, acceleration demands, duty cycles, and safety margins carefully can achieve better system reliability and stronger long-term performance.
Engineering-based selection is essential because choosing a motor based only on speed or basic power ratings often leads to oversizing, wasted energy, or unexpected failure. A well-matched servo system delivers stable performance, longer equipment life, and lower maintenance costs through optimised torque planning.
At DMKE, we help industrial buyers select the right servo motor solutions through application-focused engineering support, performance testing, and customisation options. Every system is designed to deliver high efficiency and reliability while meeting the specific demands of industrial automation environments.
Visit our website or contact us today for expert consultation and tailored recommendations. Our team is ready to support your automation goals with trusted engineering solutions built for long-term success.