Lorsque l'on parle de contrôle des mouvements et d'automatisation dans les applications industrielles, le mot "moteur" est un terme que l'on rencontre fréquemment. Cependant, ce terme est souvent utilisé de manière large et généralisée, et beaucoup ne sont pas conscients de ce qu'est un moteur. ce que fait exactement un moteur dans un contexte spécifique.
Pour les ingénieurs et les propriétaires d'entreprises, la situation est un peu différente. Ils ne peuvent pas utiliser ce terme au sens large et doivent au contraire faire la différence entre un moteur électrique commun, générique et conventionnel et un servomoteur ou toute autre forme de dispositif spécialisé. Comprendre La distinction entre servo et moteur dans un contexte général est extrêmement importante, surtout lorsqu'il s'agit d'automatisation et d'applications industrielles. En effet, le servomoteur est probablement l'un des moteurs les plus utilisés dans les différentes industries.
Le choix entre un servomoteur et un moteur conventionnel générique est difficile. il ne s'agit pas seulement de trouver celui qui a une meilleure puissance ou une meilleure vitesse. Il s'agit plutôt d'une décision qui affecte directement la précision globale, la réactivité, l'efficacité énergétique et la capacité de contrôle d'un système fonctionnant avec ce moteur. Une mauvaise compréhension de la distinction fondamentale entre les moteurs peut conduire à investir dans des systèmes dont les performances sont inférieures, dont les coûts d'exploitation sont plus élevés et dont les limites de conception perturbent l'efficacité globale et ne deviennent évidentes qu'après le déploiement.
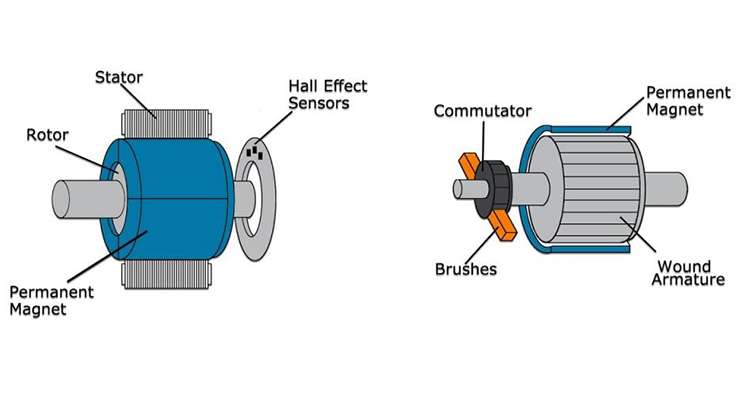
Le terme "servo" fait référence à une solution intégrée dans un système d'alimentation électrique. système de contrôle en boucle fermée. Ce moteur surveille et ajuste en permanence sa position, sa vitesse, son couple et son fonctionnement général grâce à un retour d'information constant via des encodeurs et des résolveurs. Un moteur électrique conventionnel ou générique, quant à lui, fonctionne principalement dans un système de commande à distance. méthode en boucle ouverte. Cela signifie qu'un tel moteur fournit une rotation continue lorsqu'il est alimenté sans que l'on ait connaissance de son fonctionnement en temps réel.
Si ces deux moteurs jouent un rôle essentiel dans l'ensemble des applications commerciales et industrielles, il n'en reste pas moins qu'il y a un certain nombre d'éléments à prendre en compte dans le choix du moteur. les cas où l'un des deux est plus approprié que l'autre. Cette adéquation est fortement déterminée par le niveau de précision du contrôle et d'adaptabilité requis par le système.
Avec l'évolution des systèmes d'automatisation et l'augmentation de leurs exigences en matière de performances, la décision de choisir entre un servomoteur et un moteur au sens classique du terme devient de plus en plus difficile à prendre. plus stratégique qu'une question de choix personnel. Les servomoteurs sont de plus en plus utilisés dans les applications nécessitant une grande précision, une réponse dynamique rapide et une bonne répétabilité, tandis que les moteurs électriques conventionnels et génériques continuent de dominer dans les applications où la simplicité, la robustesse et la rentabilité sont des préoccupations majeures pour les propriétaires.
Nous vous proposons ci-dessous une comparaison structurée entre les servomoteurs et les moteurs. Notre comparaison se concentrera sur contrôle, performance et comportement dans le monde réel des deux, tout en abordant des concepts tels que la complexité du système, l'adéquation de l'application, etc.
Il est important de comprendre que, plutôt que de positionner une option comme étant meilleure que l'autre de manière universelle, il s'agit d'une option plus efficace. votre cas d'utilisation et vos besoins spécifiques d'une installation motorisée qui détermine le type d'appareil le mieux adapté à vos besoins et le plus rentable.
Cependant, notre guide approfondi clarifiera les les différences entre les deux technologies, Il s'agit donc d'une lecture utile pour les ingénieurs, les concepteurs et les autres décideurs qui souhaitent faire des choix éclairés et conformes aux attentes opérationnelles du monde réel.
Différences essentielles entre servo et moteur
Pour comprendre les différences fondamentales entre les servos et les systèmes motorisés électriques conventionnels, il faut aller au-delà des spécifications de base tels que la vitesse ou la puissance nominale. La véritable différence entre ces deux systèmes réside dans la manière dont ils contrôlent les mouvements, surveillent leurs performances et s'adaptent aux changements dans les situations réelles.
Les comparaisons suivantes mettent en évidence caractéristiques et aspects spécifiques de ces deux systèmes qui permettent de différencier leurs approches dans les applications du monde réel.
- Méthode de contrôle : Boucle fermée ou ouverte
Comme nous l'avons déjà indiqué, un système d'asservissement fonctionne dans un système en boucle fermée. Dans un tel système, le moteur, ou l'appareil, est capable d'ajuster en permanence sa production sur la base du retour d'information fourni par son encodeur. Les informations reçues en microns et en nanosecondes permettent au système d'assurer un contrôle précis des paramètres connexes, notamment la position, la vitesse, le couple, la forme, etc.
En revanche, un système conventionnel fonctionne le plus souvent dans un espace restreint. système en boucle ouverte. Le mouvement est donc uniquement déterminée par la puissance qui alimente le système. Le contrôle en boucle ouverte est certes simple et assez efficace, mais il ne peut pas s'adapter aux changements et peut entraîner des fluctuations ou un effondrement excessif sous l'effet de charges externes changeantes.
- Précision de la position et du positionnement
Grâce à leur contrôle en boucle fermée, servomoteurs sont conçus pour assurer un mouvement et une vitesse précis, ainsi qu'une répétabilité. Ils sont donc idéaux pour les systèmes automatisés nécessitant des mouvements répétés, notamment les lignes d'emballage et certaines bandes robotisées. Le système en boucle fermée permet les servos exécutent des profils de mouvement exacts avec une déviation minimale, même sur des cycles répétitifs.
Les installations électriques conventionnelles, en revanche, ne disposent pas d'un tel retour d'information qui permet de garantir la précision et l'exactitude de la position. Ils sont est voué à présenter des écarts dans des conditions variables. Toutefois, lorsqu'un contrôle approximatif du positionnement est requis à un coût abordable, les systèmes génériques prennent le dessus.
- Mécanismes de rétroaction et de détection
Les dispositifs de rétroaction, y compris les codeurs et les résolveurs, constituent probablement la partie la plus importante des solutions d'asservissement. Ces pièces intégrales jouent le rôle de cerveau de ces systèmes, Le système d'information en temps réel fournit des informations continues sur la position, la vitesse et la précision du moteur à chaque microseconde. Ce retour d'information permet de prendre des mesures correctives en temps réel.
Les dispositifs conventionnels sont généralement dépourvus d'un tel système de retour d'information. Ces dispositifs sont généralement n'ont pas de mécanisme de détection qui puisse fournir un retour d'information au cerveau d'un moteur. Par conséquent, les installations conventionnelles n'ont pas d'autre choix que de s'appuyer sur des entrées électriques fixes, ce qui limite leur capacité globale à assurer des déviations correctives pendant le fonctionnement ou à s'adapter à des charges changeant de l'extérieur.

- Régulation de la vitesse et contrôle du couple
Les servomoteurs permettent un contrôle précis de la vitesse et du couple dans une large gamme d'opérations. Cela comprend également maintien de la vitesse zéro, accélération et décélération rapides. Les systèmes conventionnels et génériques, quant à eux, ne peuvent fournir une vitesse stable que dans des conditions stables.
En outre, régulation précise du couple est un problème auquel se heurtent les installations conventionnelles, en particulier lors des démarrages et des opérations à faible vitesse. Lors de changements de charge rapides, moteurs génériques Malheureusement, ils échouent également, en particulier lorsque les conditions extérieures changent constamment.
- Complexité et intégration globales du système
Les solutions d'asservissement nécessitent le plus souvent des composants supplémentaires tels que des pilotes, des dispositifs de rétroaction, des paramètres de réglage, Les systèmes de gestion de l'information sont donc plus complexes à utiliser que les systèmes de gestion de l'information. Cela augmente la complexité globale du travail avec ces systèmes, et seuls les ingénieurs et les experts sont capables de les gérer correctement.
Toutefois, la plupart des solutions d'asservissement avancées sont désormais dotées de capacités d'intégration améliorées et d'un système de contrôle de la qualité. connectivité avec les automates, les contrôleurs de mouvement et d'autres réseaux industriels. Cela simplifie grandement leur intégration globale.
Les configurations conventionnelles, en revanche, sont très simples à intégrer dans n'importe quel système, car elles nécessitent peu de composants matériels ou de codage. C'est ce qui les rend une option facile à utiliser en l'absence de conseils ou d'expérience d'un expert.
- Performance sous charge variable
Sous l'effet de charges et de conditions externes changeantes, les servos sont capable de s'adapter automatiquement Ils sont donc idéaux pour les situations où la résistance variable ou le mouvement dynamique sont fréquents. Ils sont donc idéaux pour les situations où la résistance variable ou le mouvement dynamique sont courants.
En revanche, les installations conventionnelles, peut connaître des baisses de vitesse et une augmentation de la consommation de courant, ou l'instabilité, et peuvent fluctuer ou finalement perdre leur fonctionnalité lorsqu'ils sont soumis à des charges et à des conditions externes fluctuantes.

- Efficacité énergétique et économie d'énergie
Les solutions modernes d'asservissement sont optimisées pour garantir une consommation d'énergie minimale en fournissant couple seulement au fur et à mesure des besoins, plutôt que de la fournir à chaque instant. Ce mode de fonctionnement améliore l'efficacité globale de ces systèmes dans des conditions de fonctionnement variables et leur permet d'économiser de l'énergie lorsqu'ils sont utilisés en masse.
Les moteurs conventionnels, quant à eux, sont généralement efficaces dans les applications à charge constante. Cependant, ils continuent à fournir un couple de manière constante, ce qui peut entraîner un gaspillage d'énergie lors des fluctuations de charge et des opérations à charge partielle. Ce manque d'économie d'énergie en fait une option coûteuse dans les industries où ils doivent être utilisés en continu et en grande quantité.
- Fiabilité et maintenance
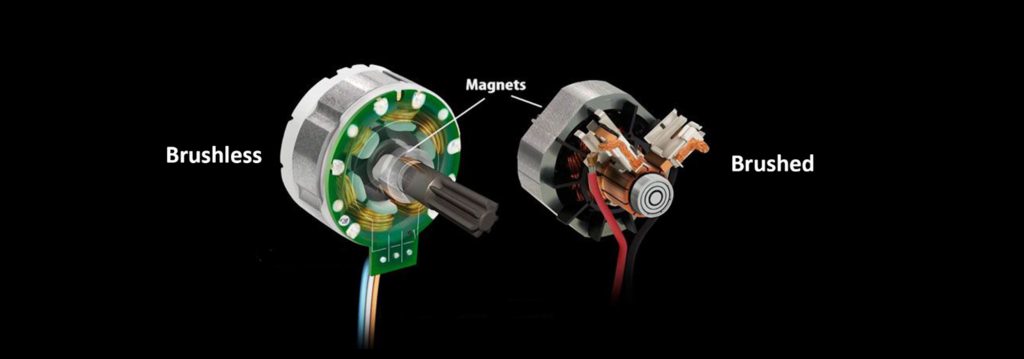
Les servos ont généralement moins d'usure mécanique. Les servos sont moteurs sans balais, et la plupart des servos utilisés dans l'automatisation industrielle sont généralement des moteurs à courant alternatif sans balais. Dans ce type de configuration, il n'y a pas de frottement ou de résistance aux composants internes, ce qui réduit l'usure mécanique. En outre, les servomoteurs modernes sont dotés de capacités de diagnostic intégrées qui permettent d'effectuer une maintenance prédictive.
Les installations conventionnelles, cependant, fonctionnent avec des brosses qui s'usent avec le temps en raison de la résistance et de la friction continue. Bien que ces installations soient faciles à entretenir, elles manque de surveillance de l'état et peut donc se déclencher à tout moment.
- Coût et investissement total du système
Les solutions servo sont modernes et dotées de technologies avancées. Il est donc compréhensible qu'elles s'accompagnent de coûts initiaux plus élevés par rapport aux installations conventionnelles, qui sont tout à fait abordables.
Toutefois, en raison de leur des capacités proactives et des fonctions d'autocontrôle, Les servomoteurs peuvent réduire les coûts à long terme tout en garantissant une réduction des temps d'arrêt et une augmentation de la productivité. Les moteurs conventionnels n'ont pas cette capacité de réduction des coûts et peuvent entraîner des coûts plus élevés dans les applications où ils sont utilisés en permanence et subissent une usure extrême.
- Évolutivité et flexibilité
Servos sont hautement évolutifs et adaptables. Ils peuvent être utilisés dans des systèmes complexes multiaxiaux et multidimensionnels, établissant de longues connexions entre différentes solutions qui fonctionnent en harmonie. Leur flexibilité et leur évolutivité les rendent idéal pour l'automatisation et pour les processus nécessitant une optimisation.
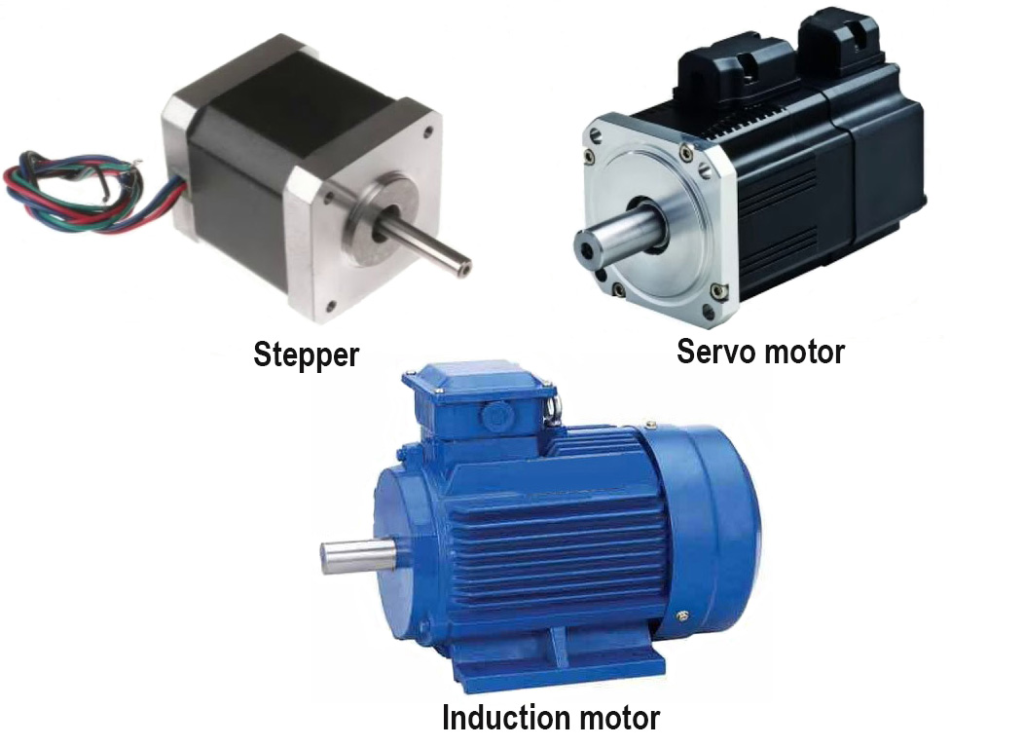
Cependant, les installations conventionnelles sont pas aussi flexible ou avancé que les servos ou des pas à pas. Ils restent donc efficaces pour une fonctionnalité fixe à court terme et ne sont généralement fiables que pour les applications à une seule vitesse.
Adéquation de l'application et alignement des cas d'utilisation
Seulement il ne suffit pas de connaître les différences susmentionnées pour choisir la bonne option entre un servomoteur et un moteur électrique conventionnel générique. Cette décision dépend plutôt du degré d'adéquation entre les capacités d'un système spécifique et vos exigences fonctionnelles, ainsi que des conditions générales de fonctionnement de l'application du système.
Il est important de comprendre que aucune de ces options n'est universellement supérieure, Chaque solution motorisée est unique et offre une valeur optimale lorsqu'elle est appliquée judicieusement dans le bon contexte. Comprendre l'alignement d'une solution motorisée spécifique avec le fonctionnement et les exigences de l'ensemble du système permet d'éviter une ingénierie excessive ou des compromis en matière de performances.
Si vous souhaitez investir dans une installation motorisée pour des applications où le positionnement précis, le mouvement contrôlé et la répétabilité sont exigés, nous vous conseillons vivement d'opter pour des servos. En robotique, la CNC, AGV, Dans le cas des systèmes d'alimentation en eau potable et des systèmes de chaînes d'assemblage automatisées, les moindres écarts de vitesse, de précision ou de mouvement peuvent affecter la qualité globale du travail ou la productivité du système.
Dans les systèmes où la synchronisation n'est pas négociable, Dans ce cas, opter pour autre chose qu'un servo est une erreur. Les servos excellent dans de tels environnements lorsqu'ils sont entretenus avec précision et qu'ils peuvent assurer le contrôle sous des charges dynamiques et des vitesses externes changeant fréquemment.
En revanche, si vous souhaitez investir dans un appareil destiné à des applications où une rotation continue, un fonctionnement régulier et un contrôle simple de la vitesse sont davantage nécessaires, Dans ce cas, il est préférable d'opter pour une installation électrique conventionnelle. Par exemple, il est courant d'utiliser des pompes, des ventilateurs, convoyeurs, Dans ces systèmes, la commande de mouvement par rétroaction n'ajoute que peu de valeur pratique. Dans ces systèmes, la commande de mouvement par rétroaction n'ajoute que peu ou pas de valeur pratique et, par conséquent, la simplicité et la rentabilité des configurations conventionnelles les rendent idéales pour ces cas.
Si vous souhaitez investir dans une installation pour n'importe quel système multi-axes à grande vitesse, Nous suggérons d'opter pour des servomoteurs en raison de leur capacité à synchroniser les mouvements de plusieurs appareils. Cette coordination est essentielle dans les systèmes d'emballage, d'impression et de manutention car, dans ces systèmes, la précision de la synchronisation a un impact direct sur le fonctionnement global du système.
Si vous souhaitez une solution pour des environnements difficiles ou robustes, les appareils conventionnels sont souvent la meilleure solution. Ils sont mécaniquement simples et donc très tolérants à la poussière, à la chaleur et aux vibrations. Toutefois, les servos modernes sont désormais équipés de boîtiers appropriés et de composants de qualité industrielle qui leur permettent de fonctionner de manière fiable dans des conditions exigeantes lorsqu'ils sont utilisés correctement.
Sensibilité aux coûts est un autre facteur important à prendre en compte lorsque l'on recherche la bonne adéquation entre plusieurs solutions motorisées. Si les servomoteurs offrent une grande valeur ajoutée au niveau du système et sont parfaits pour les systèmes intelligents, leur précision et leur capacité d'autocorrection ne se traduisent pas toujours par des gains mesurables. Dans ce cas, les moteurs conventionnels constituent une solution plus économique.
Tableau de comparaison de l'aptitude à l'emploi
| Type d'application | Adéquation du servomoteur | Adéquation du moteur conventionnel | Raison principale |
| Robotique et automatisation | Élevé | Faible | Requiert des mouvements précis et synchronisés |
| Centres d'usinage et CNC | Élevé | Faible | La précision et la répétabilité sont essentielles |
| Emballage et étiquetage | Élevé | Modéré | Réponse rapide et précision de la synchronisation |
| Systèmes de manutention | Élevé | Modéré | Charges variables et contrôle dynamique |
| Pompes et ventilateurs | Faible | Élevé | Fonctionnement à vitesse constante |
| Convoyeurs (simples) | Faible | Élevé | Exigences minimales en matière de positionnement |
| Machines pour l'impression et le textile | Élevé | Modéré | Contrôle de la tension et de l'enregistrement |
| Compresseurs | Faible | Élevé | Fonctionnement continu |
Limites et compromis
Bien que les systèmes servo et les systèmes électriques conventionnels aient chacun leurs avantages propres, ils présentent tous deux les caractéristiques suivantes certaines limites à prendre en compte lors de leur intégration dans la conception d'un système. Ignorer les compromis et les limites des deux configurations peut entraîner des attentes de performances inadaptées ou des temps d'arrêt inutiles.
Systèmes d'asservissement introduire une plus grande complexité dans le système parce qu'ils reposent sur des dispositifs de rétroaction, des pilotes d'asservissement et des algorithmes de contrôle. Cette complexité augmente le temps nécessaire à l'installation initiale et exige une planification et un réglage minutieux des paramètres si l'on veut obtenir des résultats stables et fiables. Un réglage inadéquat et une mauvaise intégration peuvent entraîner des systèmes défectueux, des oscillations, du bruit et des vibrations.
A partir d'un la perspective des coûts, Les systèmes asservis représentent souvent un investissement total plus élevé. Outre le système lui-même, des dépenses supplémentaires sont nécessaires pour son déploiement, notamment des investissements dans des encodeurs, des pilotes, un blindage, un câblage et des contrôleurs plus avancés. Si vous cherchez à mettre en place un système dont la précision n'est pas extrêmement critique, ce coût supplémentaire n'en vaut peut-être pas la peine.
Les servos nécessitent aussi souvent un un environnement propre et stable pour un fonctionnement correct. Ces systèmes ne fonctionnent pas bien en présence de bruit électrique, d'une mauvaise mise à la terre du noyau ou d'une mauvaise gestion des câbles, car ces problèmes peuvent dégrader la rétroaction globale du signal, ce qui affecte la précision et la fiabilité. Des mesures de protection supplémentaires peuvent être nécessaires dans les environnements difficiles pour que les servos fonctionnent correctement.
Les systèmes conventionnels, quant à eux, sont plus simples et plus robustes. Cependant, ils n'ont pas la capacité de corriger activement pour les variations de charge. Lorsque les conditions externes et les charges changent, des écarts de vitesse et de couple se produisent fréquemment, ce qui affecte la cohérence globale du système.
Un autre compromis concerne l'eefficacite energetique sous charges variables. Alors que les moteurs conventionnels sont efficaces en fonctionnement régulier, ils ont tendance à consommer de l'énergie en excès lorsque les conditions de charge fluctuent de manière répétée.
En fin de compte, la décision est déterminée par précision du contrôle et simplicité du système. Les servos privilégient les performances et l'adaptabilité, tandis que les systèmes conventionnels mettent l'accent sur la facilité d'utilisation et la rentabilité.
Cadre décisionnel : Choisir un servomoteur ou un moteur
En connaissant tous les avantages, les différences d'utilisation, ainsi que les inconvénients, la décision finale de choisir la technologie motorisée appropriée exige une évaluation structurée des demandes d'application plutôt que de préférer simplement un type particulier.
Ci-dessous se trouvent les les mesures que vous pouvez prendre afin d'assurer un choix approprié du système motorisé :
- Définir les exigences en matière de contrôle des mouvements
- Évaluation des caractéristiques liées à la charge
- Compte tenu de la complexité globale de l'intégration du système
- Évaluation de l'impact sur les coûts et les performances
- Visualiser les contraintes environnementales ainsi que les exigences en matière de maintenance
- Planification de l'évolutivité et de l'expansion future
Obtenez dès aujourd'hui vos solutions conventionnelles et d'asservissement auprès de DMKE
À DMKE, Nos experts sont en mesure de vous fournir des solutions servo et conventionnelles. En fonction de vos besoins, nous pouvons vous proposer des solutions prêtes à l'emploi et de haute qualité, ainsi que personnaliser vos moteurs en fonction de vos besoins.
Toutes nos offres sont soumises à un test rigoureux en huit étapes avant la vente et sont fabriqués avec des composants de la plus haute qualité afin de garantir les meilleurs résultats dans toutes les conditions.
Visitez notre site Web ou nous contacter dès aujourd'hui pour commencer votre consultation et trouver la meilleure solution de motorisation pour votre système.