Le choix du bon servomoteur ne se limite pas à la vitesse ou à la taille du moteur. Dans le domaine de l'automatisation industrielle, la véritable différence de performance se résume souvent à un facteur critique : couple du servomoteur. Que l'application concerne la robotique, les systèmes CNC, les machines d'emballage ou l'automatisation des convoyeurs, un dimensionnement incorrect du couple peut entraîner une surchauffe, un mouvement instable, une consommation d'énergie excessive et une défaillance inattendue de l'équipement.
De nombreux acheteurs se concentrent sur le nombre de tours par minute, sans tenir compte de la force de rotation dont le système a réellement besoin dans des conditions d'exploitation réelles. Un moteur qui semble puissant sur le papier peut néanmoins tomber en panne s'il n'est pas en mesure de gérer les pics de charge, les forces d'accélération ou les cycles répétés de démarrage et d'arrêt. Dans le même temps, le surdimensionnement engendre des coûts inutiles, un encombrement plus important du système et une efficacité moindre. C'est pourquoi dimensionnement correct du couple l'une des décisions techniques les plus importantes dans la conception des commandes de mouvement.
Le couple du servomoteur affecte directement la précision du positionnement, la vitesse de réponse et la fiabilité à long terme. Il détermine la souplesse avec laquelle une machine gère les changements de charge, maintient la précision et fonctionne en continu. Dans les applications où les temps d'arrêt sont coûteux, le choix d'une capacité de couple correcte n'est pas simplement une préférence technique, mais un facteur majeur de protection de la productivité et de la durée de vie de l'équipement. performance stable du système.
Les exigences en matière de sélection du couple varient d'une industrie à l'autre. Un bras robotisé soulevant des charges utiles variables nécessite un comportement de couple très différent de celui d'une ligne d'emballage effectuant des milliers de cycles rapides et répétitifs chaque jour. La compréhension de ces différences opérationnelles permet aux acheteurs d'éviter les systèmes sous-performants et de soutenir les applications spécifiques. dimensionnement au lieu de s'appuyer sur une sélection générique de moteurs.
Un autre défi consiste à équilibrer les exigences en matière de couple continu et de couple de pointe. De nombreux systèmes fonctionnent bien sous des charges moyennes, mais échouent lors d'accélérations soudaines ou de démarrages brutaux. Ignorer ces moments peut réduire la durée de vie du moteur et créer des problèmes de maintenance. Les ingénieurs doivent évaluer les deux plages de fonctionnement pour s'assurer que fiabilité à long terme et une production efficace.
Ce guide explique comment calculer le couple requis pour un servomoteur, comment la règle des 90-10 aide à prendre des décisions pratiques en matière de dimensionnement et comment les ingénieurs mesurent le couple dans des applications réelles. L'objectif est d'aider les acheteurs industriels à comprendre clairement le couple des servomoteurs afin qu'ils puissent prendre des décisions sûres et rentables lorsqu'ils choisissent des systèmes de contrôle du mouvement avec des systèmes de contrôle du mouvement. une meilleure confiance en l'ingénierie. Poursuivez donc votre lecture :
Qu'est-ce que le couple d'un servomoteur ?
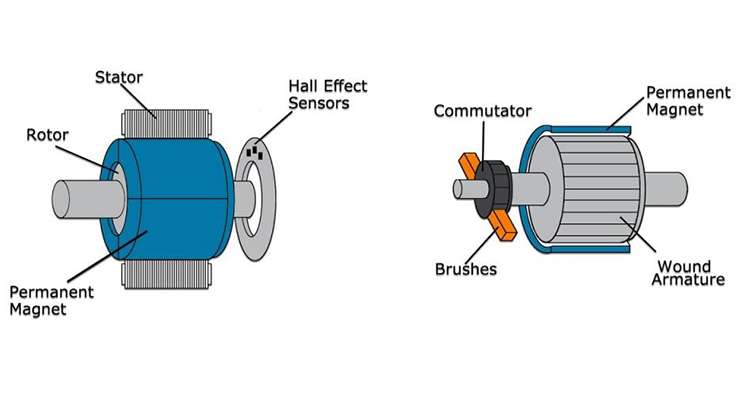
Servomoteur Le couple désigne la force de rotation qu'un servomoteur produit pour déplacer, maintenir ou contrôler une charge mécanique. En termes simples, il s'agit de la puissance de rotation qui permet au moteur de faire tourner un arbre, de soulever une charge ou de maintenir un positionnement précis sous l'effet d'une résistance. Comprendre couple du servomoteur est essentielle car elle détermine directement l'efficacité d'un système dans les applications industrielles réelles.
De nombreux acheteurs confondent le couple et la vitesse, mais les deux ont des objectifs différents. La vitesse fait référence à la vitesse de rotation du moteur, tandis que le couple définit la force qu'il peut appliquer au cours de ce mouvement. Un moteur peut avoir une vitesse de rotation élevée mais tomber en panne s'il ne peut pas générer une force de rotation suffisante pour la charge. C'est pourquoi capacité de manutention de la charge Dans de nombreux systèmes d'automatisation, la vitesse n'est pas le seul facteur déterminant.
Couple diffère également de la puissance globale du moteur. La puissance combine à la fois la vitesse et le couple, mais dans les applications d'asservissement, le couple devient souvent le facteur décisif, car la précision et la force contrôlée sont essentielles. Dans la robotique, les machines à commande numérique et les systèmes de convoyage, un couple insuffisant peut entraîner des mouvements instables, des erreurs de positionnement ou une défaillance opérationnelle complète, réduisant ainsi la durée de vie de l'appareil. performance du système fiabilité au fil du temps.
Une autre distinction importante est celle qui existe entre couple continu et couple de pointe. Le couple continu est la quantité de force que le moteur peut fournir en toute sécurité sur de longues périodes de fonctionnement sans surchauffe. Le couple de pointe se réfère aux brèves poussées de force plus élevée nécessaires pendant l'accélération, les changements de charge soudains ou les conditions de démarrage. Le choix d'un juste équilibre entre ces deux valeurs garantit fonctionnement stable du moteur sans risque de surcharge inutile.
Pour les acheteurs industriels, la compréhension du couple n'est pas seulement un détail technique, mais une décision d'achat qui affecte l'efficacité, les coûts de maintenance et la durée de vie de l'équipement. Choisir le bon couple de servomoteur permet d'améliorer la précision des mouvements, de réduire les temps d'arrêt et de soutenir la productivité à long terme. un meilleur contrôle des mouvements dans l'ensemble du système.
Comment calculer le couple nécessaire à un servo ?
Calculer le montant correct servomoteur Le couple commence par la compréhension des exigences mécaniques réelles de l'application. Les acheteurs ne doivent pas se fier uniquement aux valeurs nominales du catalogue, car chaque machine présente des conditions de charge, des profils de mouvement et des environnements de fonctionnement différents. Un calcul correct permet d'éviter le sous-dimensionnement ou le surdimensionnement, en garantissant sélection précise du moteur pour une performance industrielle à long terme.
Comprendre les exigences de charge
La première étape consiste à identifier la charge totale de la servomoteur doit déplacer ou contrôler. Cela inclut le poids de l'objet à déplacer, la structure mécanique connectée au moteur et toute résistance externe telle que la friction ou la gravité. Les applications impliquant un levage vertical nécessitent un couple plus important que les mouvements horizontaux, car le moteur doit continuellement travailler contre la gravité, ce qui crée un effet de couple. une demande de charge plus élevée pendant le fonctionnement.
Il est également important de distinguer les conditions de charge statique et de charge dynamique. La charge statique fait référence à la force nécessaire pour maintenir une position, tandis que la charge dynamique comprend l'accélération, la décélération et les changements de mouvement pendant le fonctionnement. Ignorer les conditions dynamiques conduit souvent à des calculs incorrects et à des performances médiocres dans des conditions de travail réelles. L'évaluation des deux types de charge garantit planification équilibrée du couple pour un fonctionnement stable du système.
Calcul de l'accélération et de la force requise
L'accélération a un impact majeur sur le couple du servomoteur car le moteur doit générer une force supplémentaire pour démarrer et arrêter le mouvement rapidement. Systèmes d'automatisation à grande vitesse, Les systèmes d'emballage, tels que les lignes d'emballage ou les bras robotisés, nécessitent souvent un couple d'accélération élevé, même si la charge moyenne semble faible. C'est ce qui fait que les analyse du profil de mouvement critiques lors de la sélection du moteur.
Les cycles de démarrage et d'arrêt fréquents augmentent également la demande de couple. Une machine fonctionnant en continu à une vitesse stable peut avoir besoin d'un couple de pointe moins important qu'une machine effectuant des tâches de positionnement rapides et répétitives. Les ingénieurs doivent calculer la force d'accélération avec soin afin d'éviter les surcharges soudaines et de maintenir un niveau de couple élevé. une production sans heurts dans différentes conditions de fonctionnement.
Conversion de la force en couple de servomoteur
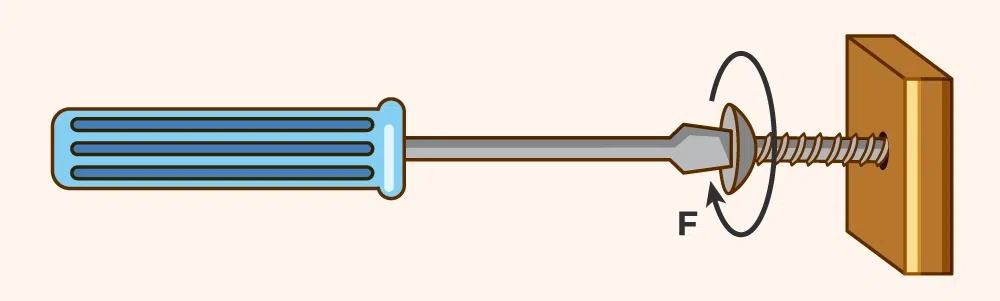
Une fois la force requise connue, elle doit être convertie en couple en utilisant la relation de base entre la force et le rayon. La formule standard est basée sur la force multipliée par la distance du centre de rotation, ce qui permet de déterminer la force de rotation réelle nécessaire à l'arbre.
T=F×rT = F \times rT=F×r
Où T représente le couple, F la force et r le rayon ou le bras de levier. Un rayon plus grand augmente la demande de couple même si la charge reste la même. C'est pourquoi la taille de la poulie, le diamètre de l'engrenage et la longueur du bras de levier ont une incidence directe sur l'efficacité de la transmission. couple du servomoteur dans les applications pratiques.
Sélection couple continu/couple de pointe
Le choix du couple ne se limite pas aux exigences de force maximale. Les acheteurs doivent comparer les valeurs de couple continu et de couple de pointe pour s'assurer que le moteur fonctionne en toute sécurité dans toutes les conditions de fonctionnement. Le couple continu protège contre la surchauffe en cas de fonctionnement prolongé, tandis que le couple de pointe protège contre la surchauffe en cas de fonctionnement prolongé. couple de pointe gère de brèves rafales lors du démarrage ou de l'accélération, en fournissant gestion sûre de la charge au fil du temps.
Le choix d'un moteur basé uniquement sur le couple de pointe peut créer des problèmes thermiques, tandis que le choix d'un moteur basé uniquement sur le couple continu peut entraîner des défaillances lors de pics de charge soudains. Une évaluation équilibrée des deux valeurs garantit fiabilité à long terme et permet d'éviter les temps d'arrêt coûteux ou le remplacement prématuré du moteur.
Comparaison entre le type de charge et le couple requis
| Type de charge | Couple requis | Considération de l'acheteur |
| Mouvement horizontal | Modéré | Focus sur le frottement et l'accélération |
| Levage vertical | Élevé | Doit surmonter la gravité en permanence |
| Cycles de démarrage et d'arrêt | Couple de pointe élevé | Important pour l'emballage et la robotique |
| Rotation continue | Couple continu stable | La gestion thermique est essentielle |
| Systèmes à charge utile variable | Demande de couple mixte | Nécessite une marge de sécurité dans le dimensionnement |
Comment déterminer le couple nécessaire à un moteur ?
Pour déterminer le couple nécessaire à un moteur, il faut procéder à une évaluation pratique du fonctionnement réel de la machine et ne pas se contenter de valeurs de charge théoriques. Les acheteurs doivent tenir compte de l'environnement de travail, de la fréquence des mouvements, des changements de charge utile et des attentes en matière de vitesse de production pour s'assurer que dimensionnement réel du moteur qui permet d'obtenir des performances fiables.
La première étape consiste à analyser l'application elle-même. A transporteur Le déplacement continu de matériaux légers nécessitera un profil de couple différent de celui d'un bras robotisé soulevant des pièces lourdes avec une accélération soudaine. Comprendre le type de mouvement aide les ingénieurs à déterminer si le système a besoin d'un couple continu stable ou d'un fort couple de pointe à court terme pour les cycles exigeants.
La vitesse et l'équilibrage de la charge sont d'autres facteurs importants. L'augmentation de la vitesse modifie souvent la demande de couple, car le moteur doit gérer à la fois les exigences de mouvement et de force. Le choix d'un moteur bien équilibré permet d'éviter le gaspillage d'énergie et d'améliorer la qualité de l'air. une performance efficace du système sans surdimensionner l'ensemble du système d'entraînement.
Le cycle de fonctionnement joue également un rôle important. Les moteurs fonctionnant pendant de longues heures sous une charge constante ont besoin d'un couple nominal continu plus élevé, tandis que les systèmes fonctionnant par à-coups peuvent s'appuyer davantage sur des valeurs de couple de pointe. Ignorer le cycle de fonctionnement conduit souvent à des problèmes de surchauffe et à une réduction de la durée de vie du moteur, ce qui rend les moteurs plus difficiles à utiliser. planification de la performance thermique essentiel.
La plupart des acheteurs industriels appliquent également une marge de sécurité lors de la sélection. Au lieu de choisir un moteur qui correspond exactement à la demande calculée, les ingénieurs ajoutent souvent 20 à 30 % de capacité supplémentaire pour faire face aux changements de charge inattendus et aux variations de fonctionnement futures. Cela permet de créer une meilleure stabilité opérationnelle et réduit le risque de défaillance prématurée du système.
Comment calculer le couple dont j'ai besoin ?
Pour calculer le couple dont vous avez besoin, il faut d'abord comprendre les conditions de travail réelles de la machine et ne pas se fier uniquement aux valeurs figurant dans les catalogues de moteurs. Les acheteurs doivent tenir compte du poids de la charge, du type de mouvement, des exigences en matière d'accélération et de la fréquence de fonctionnement pour s'assurer que estimation pratique du couple pour des performances industrielles réelles.
La première étape consiste à identifier la charge totale que le moteur doit déplacer. Cette charge comprend non seulement le produit ou la charge utile, mais aussi les accessoires, les bras, les poulies et toute résistance mécanique au sein du système. Friction, gravité, et les forces externes doivent toutes être prises en compte car elles augmentent directement la valeur de l'entreprise. force de rotation requise pendant le fonctionnement.
Ensuite, il faut tenir compte du style de mouvement. Un système qui se soulève verticalement nécessitera un couple plus important qu'un système qui se déplace horizontalement, car la gravité ajoute une résistance constante. De même, les machines dont les cycles de démarrage et d'arrêt sont rapides exigent un couple de pointe plus important que les systèmes fonctionnant à une vitesse stable. L'évaluation des conditions de mouvement permet calcul précis de la charge et empêche le sous-dimensionnement.
L'accélération est un autre facteur important. Une accélération plus rapide nécessite plus de force car le moteur doit surmonter rapidement l'inertie. Dans les lignes d'emballage, la robotique et les systèmes d'indexation, l'accélération crée souvent une demande de couple plus importante que la charge elle-même. C'est pourquoi analyse dynamique des forces critique pour une sélection correcte du moteur.
Une fois la force identifiée, elle est convertie en couple en utilisant le rayon de la pièce en rotation, telle qu'une poulie, une roue ou un bras. Un rayon plus grand augmente le couple nécessaire, même si la charge appliquée est la même. Cette relation simple aide les ingénieurs à créer des décisions de dimensionnement fiables pour la conception pratique des machines.
Enfin, une marge de sécurité doit toujours être ajoutée. La plupart des applications industrielles nécessitent une capacité supplémentaire pour faire face aux changements de charge soudains, à l'usure au fil du temps et aux demandes de production inattendues. L'ajout de cette marge améliore fiabilité à long terme du moteur et protège le système contre les défaillances liées à la surcharge.
Liste de contrôle pour le calcul rapide du couple
| Étape de sélection | Ce qu'il faut vérifier | Pourquoi c'est important |
| Poids de la charge | Produit + installations + résistance | Définit le couple de base nécessaire |
| Type de mouvement | Mouvement horizontal ou vertical | Modifie l'impact de la gravité |
| Accélération | Changements de vitesse au démarrage et à l'arrêt | Affecte la demande de couple de pointe |
| Rayon | Longueur de la poulie, de l'engrenage ou du bras | Influence directe sur le couple |
| Cycle de travail | Utilisation continue ou intermittente | Détermine les limites thermiques |
| Marge de sécurité | Réserve de capacité supplémentaire | Prévient les problèmes de surcharge |
Qu'est-ce que la règle 90-10 du couple ?
La règle du couple 90-10 est une directive pratique utilisée dans la sélection des moteurs pour éviter le surdimensionnement. Elle signifie que la plupart des systèmes fonctionnent environ 90 % du temps en charge normale et seulement 10 % en charge de pointe. Cela permet aux acheteurs de se concentrer sur demande opérationnelle réelle au lieu de sélectionner des moteurs uniquement pour de rares situations de charge maximale.
De nombreux acheteurs choisir des moteurs plus puissants en se basant uniquement sur les exigences de couple de pointe, ce qui augmente les coûts, la consommation d'énergie et la taille du système. La règle 90-10 encourage les ingénieurs à donner la priorité aux éléments suivants performance du couple en continu tout en garantissant un couple de pointe suffisant pour de courtes périodes telles que le démarrage ou des changements de charge soudains.
Cette approche permet d'améliorer l'efficacité, de réduire les risques de surchauffe et de soutenir sélection de moteurs équilibrés pour une meilleure fiabilité à long terme des systèmes d'automatisation industrielle.
Comment mesurer le couple d'un servomoteur ?
La mesure du couple des servomoteurs aide les ingénieurs à vérifier si le moteur fonctionne dans la plage de fonctionnement prévue. Elle permet aux acheteurs de comparer le couple nominal aux conditions de travail réelles et d'identifier les risques de surcharge avant qu'ils ne provoquent une défaillance. Une mesure correcte permet performance stable du système et améliore la fiabilité à long terme.
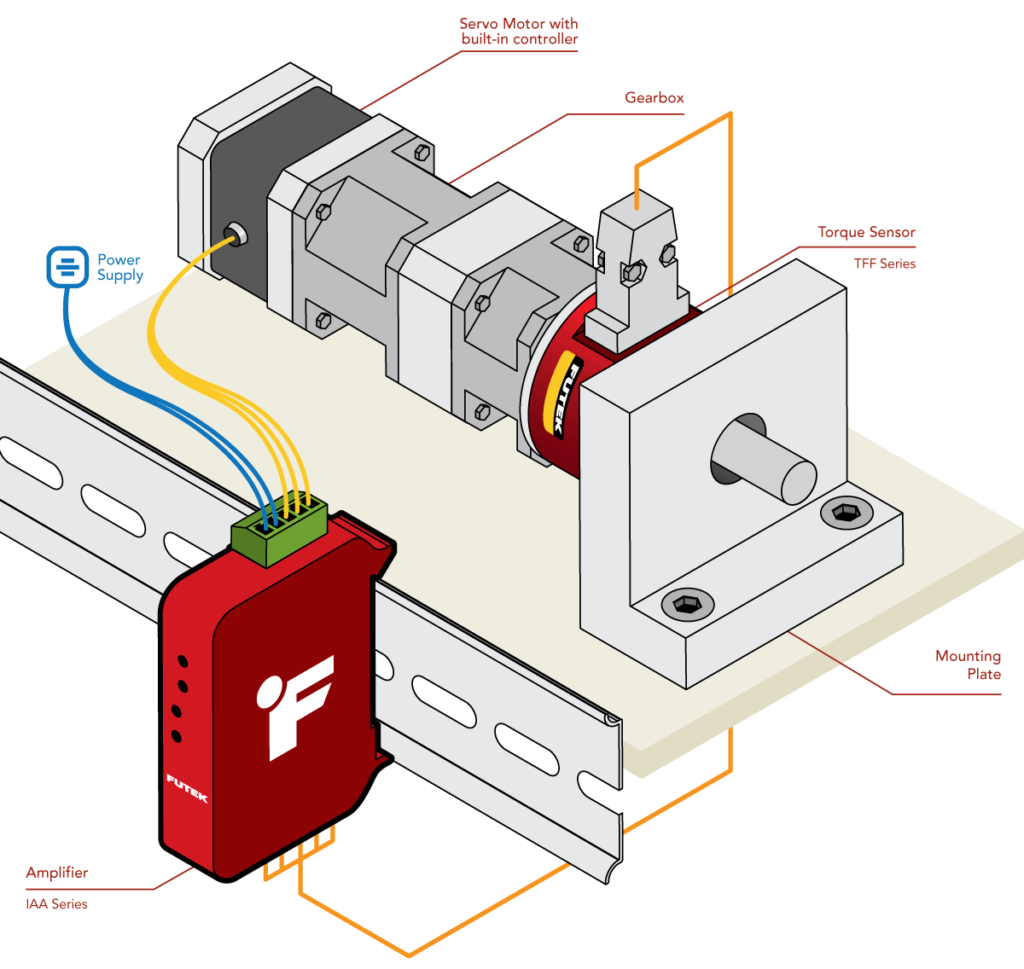
Une méthode courante consiste à utiliser des capteurs de couple ou des transducteurs de couple installés directement sur l'arbre ou le système d'entraînement. Ces dispositifs mesurent la force de rotation en temps réel pendant le fonctionnement et fournissent des données précises sur les performances. Cela permet aux ingénieurs de surveiller conditions de charge réelles au lieu de s'appuyer uniquement sur des calculs théoriques.
Les servomoteurs fournissent également un retour d'information sur le couple par l'intermédiaire des systèmes de contrôle. De nombreux variateurs modernes affichent des valeurs de couple en temps réel en fonction du courant et de la réponse de la charge, ce qui permet aux opérateurs de suivre les performances sans avoir recours à des outils de mesure externes. Cela permet d'améliorer la planification de la maintenance et de soutenir surveillance prédictive du système.
La comparaison entre le couple nominal et le couple de fonctionnement mesuré permet d'éviter les surchauffes et les pannes imprévues. Si le moteur fonctionne régulièrement à proximité ou au-dessus de sa limite, un redimensionnement ou un ajustement du système peut s'avérer nécessaire. Une mesure régulière du couple garantit la sécurité opérationnelle à long terme et une meilleure efficacité du contrôle des mouvements.
Erreurs courantes lors de la sélection du couple d'un servomoteur
Sélection servomoteur Un couple incorrect peut entraîner de graves problèmes de performance, même si le moteur est de haute qualité. De nombreux échecs sont dus au fait que les acheteurs se concentrent uniquement sur la vitesse ou la taille du moteur sans comprendre pleinement le comportement de la charge. Éviter ces erreurs permet d'atteindre les objectifs suivants un fonctionnement fiable du système et une meilleure efficacité à long terme.
Une erreur courante consiste à surdimensionner le moteur. De nombreux acheteurs pensent qu'un moteur plus gros est toujours plus sûr, mais une capacité de couple excessive augmente le coût, la consommation d'énergie et la taille du système sans améliorer les performances réelles. Un dimensionnement correct garantit utilisation efficace du moteur au lieu de dépenser inutilement.
Un autre problème majeur est de ne pas tenir compte de la charge d'accélération. Certains systèmes semblent légers dans des conditions normales, mais nécessitent un couple de pointe élevé au démarrage, à l'arrêt ou lors de changements de direction rapides. Si cette charge n'est pas calculée correctement, le moteur peut tomber en panne dans des conditions de fonctionnement réelles, ce qui réduit la durée de vie du moteur. une production stable.
Il est également risqué de sous-estimer le couple maximal. Un moteur sélectionné uniquement pour un fonctionnement continu risque de surchauffer ou de perdre en précision lors de brusques pics de charge. Les ingénieurs doivent évaluer à la fois les besoins continus et les besoins de pointe afin de maintenir un niveau de qualité élevé. la manutention sûre des charges sur l'ensemble des cycles de mouvement.
De nombreux acheteurs oublient également les limites thermiques. Même si les valeurs de couple semblent correctes, une mauvaise gestion de la chaleur peut réduire la durée de vie du moteur et entraîner des temps d'arrêt. Une bonne planification thermique permet fiabilité à long terme et protège les investissements dans les systèmes d'automatisation industrielle.
Choisir la bonne solution pour les servomoteurs avec l'aide d'experts en ingénierie - Se connecter avec DMKE
Le choix du couple correct d'un servomoteur est l'une des décisions les plus importantes dans la conception d'un système de commande de mouvement. Un dimensionnement correct du couple améliore la précision du positionnement, réduit les risques de surchauffe et garantit un fonctionnement régulier de la machine dans des conditions de travail réelles. Les acheteurs qui évaluent soigneusement les exigences de charge, les demandes d'accélération, les cycles d'utilisation et les marges de sécurité peuvent obtenir les résultats suivants une meilleure fiabilité du système et une meilleure performance à long terme.
Une sélection basée sur l'ingénierie est essentielle, car le choix d'un moteur basé uniquement sur la vitesse ou la puissance nominale de base conduit souvent à un surdimensionnement, à un gaspillage d'énergie ou à des pannes inattendues. Un système d'asservissement bien adapté offre des performances stables, une durée de vie plus longue de l'équipement et des coûts de maintenance réduits grâce aux éléments suivants planification optimisée du couple.
À DMKE, Nous aidons les acheteurs industriels à sélectionner les bonnes solutions de servomoteurs grâce à une assistance technique axée sur les applications, tests de performance, et des options de personnalisation. Chaque système est conçu pour fournir efficacité et fiabilité élevées tout en répondant aux exigences spécifiques des environnements d'automatisation industrielle.
Visitez notre site web ou contactez-nous dès aujourd'hui pour obtenir des conseils d'experts et des recommandations sur mesure. Notre équipe est prête à soutenir vos objectifs d'automatisation avec des solutions d'ingénierie fiables construit pour une réussite à long terme.